HNO-Mikromanipulator
Project title
DFG LU604/75-2 Mikromanipulatoren in der HNO-Chirurgie


Goal
Further development of a Micro-Manipulator and addition of a robotic arm
Contact
M.Sc. Samuel Detzel (wiss. Mitarbeiter)
Application
ENT surgery, especially stapedotomy
Research topic
Combining the Micro-Manipulator with a Macro-Manipulator
Development of new of handling interface concepts
State of the art
Manual manipulation of surgical instruments (forceps, scissors), often in combination with a microscope
Drawbacks of the State of the Art
Poor visibility of the operating field
Surgeon forced into non-ergonomic posture, leading to fatigue
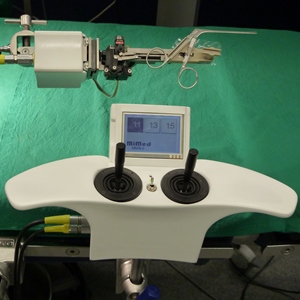
Concept
Micro-Manipulator using standard instruments placed on macro-manipulator for extension of workspace and functionality
Current Results
Control of internal CAN Bus of JACO robot arm
Alternative User Interfaces for controlling the JACO arm
Capacitive proximity sensors in 3D printed robotic arms