DFG Projekt: Automatisierte Echtzeitbildgebung fuer laparoskopische Eingriffe
Das DFG Projekt "Automatisierte Echtzeitbildgebung fuer laparoskopische Eingriffe" (LU 604/27-1, STO 268/2-1) ist eine Zusammenarbeit zwischen der Klinik und Poliklinik für Urologie (Professor Stolzenburg) am Universitätsklinikum Leipzig und dem Lehrstuhl MIMED (Professor Lueth) an der Technischen Universität München. Das Projekt läuft seit dem September 2009.

Minimalinvasive Eingriff in der Urologie
In dem Projekt werden Eingriffe an der Niere in den Mittelpunkt gestellt. Dabei werden bei einer Tumorresektion Teil der Niere entfernt.

Bisherige Operationsmethode
Die Teilresektion der Niere erfolgt laparoskopisch, d.h. mit stangenartigen Instrumenten, die durch dünne Rohre in die Bauchhöhle geführt werden. Die Bauchhöhle ist dabei mit Kohlendioxid mit leichtem Überdruck aufgebläht, um gut darin arbeiten zu können. Als Bildgebung wird ausschließlich ein Videoendoskop (Laparoskop) verwendet.
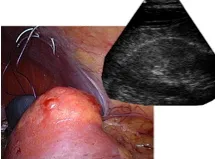
Der Wunsch nach einer intraoperativen Echtzeitbildgebung
Das Videoendoskop kann intraoperativ nur Oberflächenbilder liefern und keine Bilder über die interne Struktur der Niere. Eine intraoperative Echtzeitbildgebung kann durch Ultraschall erreicht werden. Jedoch sind weder das laparoskopische Ultraschall noch das transkutane Ultraschall geeignet.

Aufgabenstellung
Ziel des Projekts ist es eine intraoperative Echtzeitbildgebung der Inneren Struktur der Niere und der benachbarten Organe zu erreichen.
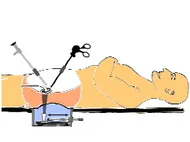
Ein motorisierter flüssigkeitsgelagerter tischintegrierter Ultraschallkopf
Das im Rahmen des Projekt verfolgte Konzept basiert darauf, unterhalb des Patienten einen motorisiert verstellbaren Ultraschallkopf anzubringen bzw. den Patienten auf einem neuartigen Ultraschallsystem zu lagern, das in den Operationstisch integriert ist. Der Schallkopf befindet sich in einer schallleitenden Flüssigkeit. Der Schall wird durch eine flexible Membran in den Patientenkörper geleitet.
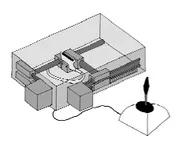
Manuelles und automatisiertes Verfahren des Kopfes
Im Betrieb liefert der Schallkopf Bilder des Patientenkörpers und der Niere, da der Schall durchgehend schallleitende Flüssigkeit oder Gewebe durchdringt bzw. von diesen reflektiert wird. Es ist möglich den Schallkopf in 2 Translationsachsen zu verstellen und nach Möglichkeit auch in 2 Kippachsen. Neben einer manuellen Bewegung ist auch das automatisierte Folgen oder das Suchen von anatomischen Strukturen oder des Instruments vorgesehen.

Alleinstellung
Ein derartiges System ist bisher weder technisch noch klinisch publiziert worden.

Hypothese
Im Rahmen des Projekts soll geklärt werden, ob dieser neuartige Ansatz bei einer Nierenteilresektion vorteilhaft für Patient oder Chirurg eingesetzt werden kann. Hat das System eine OP-Entscheidung verändert? Hat das System die Sicherheit des Eingriffs erhöht? Konnte die OP bei gleicher Qualität schneller durchgeführt werden?
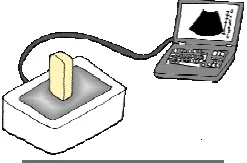
Experiment und Messung
In ersten Experimenten wurde das Ultraschallsystem zur Vermessung von Kalibrationskörpern im Labor verwendet.
Ergebnis
In ersten Experimenten konnte gezeigt werden, dass die Bildqualität des Ultraschallkopfes mit dem eines manuell geführten transkutanen Ultraschallsystems vergleichbar ist (IEEE EMBC).
Publications:
J.D.J. Gumprecht; F. Geiger; J.-U. Stolzenburg; und T.C. Lueth, „A Flat-Panel Ultrasound Robot to Align an Abdominal Ultrasound Probe During Laparoscopic Partial Nephrectomy“, Proceedings of ASME 2012 International Mechanical Engineering Congress and Exposition (IMECE 2012), Houston, TX, USA: 2012, S. Digital Proceedings. PAPER–ID: IMECE2012–87280.
J.D.J. Gumprecht; T.C. Lueth; und M.B. Khamesee, „Tracking of a Magnetic Capsule-Robot inside the Human Esophagus based on a Novel Ultrasound Navigation System“, 2012 ASME-ISPS /JSME-IIP Joint International Conference on Micromechatronics for Information and Precision Equipment (MIPE2012), Santa Clara, CA, USA: 2012, S. 20 – 22.
J.D.J. Gumprecht; M. Baumann; A. Menz; J.-U. Stolzenburg; und T.C. Lueth, „A modular Control Concept for a Flat-Panel Ultrasound Robot“, Proceedings of the 4th IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, IEEE BioRob, Rome, Italy: 2012, S. 907 – 912.
J.D.J. Gumprecht und T.C. Lueth, „Chirurgische Assistenzmethoden: Kleine Spezialsysteme unter-stützen den Chirurgen von heute“, Medizintechnik in Bayern, 2011, S. 42–44.
J.D.J. Gumprecht und T.C. Lueth, „Methods for surgical Assistance: Today, Surgeons are supported by small, specialized Systems“, Medical Technology in Bavaria, 2011, S. 42–44.
J.D.J. Gumprecht, T. Bauer, J.-U. Stolzenburg, and T.C. Lueth, “A Robotics-Based Flat-Panel Ultrasound Device for Continuous Intraoperative Transcutaneous Imaging,” Proceedings of 33rd Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Boston, MA, USA: 2011, pp. 2152-2155.
J.D.J. Gumprecht, F. Geiger, J.-U. Stolzenburg, and T.C. Lueth, “Intraoperative Integration Concepts for a Flat-Panel Ultrasound Robot,”Proceedings of IEEE Robotics and Biomimetics (Robio) Conference, Phuket, Thailand: IEEE, 2011, pp. 431-436.
J.D.J. Gumprecht, A. Bartl, J.-U. Stolzenburg, and T.C. Lueth, “Ultrasound Standoff Optimization for Maximum Image Quality of a Robot-Assisted Flat-Panel Ultrasound Device,” Proceedings of 33rd Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Boston, MA, USA: IEEE, 2011, pp. 7187-7190.
J.D.J. Gumprecht, T. Maier, R. Eckl, J.-U. Stolzenburg, and T.C. Lueth, “A new ultrasound imaging concept for laparoscopy in urology.,”Proceedings of 32nd Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Buenos Aires: 2010, pp. 5991-5994.
J.D.J. Gumprecht, T. Maier, M. Markert, J.-U. Stolzenburg, and T.C. Lueth, “A new concept for ultrasound imaging during laparoscopic tumor resection in urology,” Proceedings of CARS Computer Assisted Radiology and Surgery, Geneve: 2010, p. S127-S129.
J.D.J. Gumprecht, T. Maier, R. Eckl, J.-U. Stolzenburg, and T.C. Lueth, “Laparoskopische Tumor-resektion in der Urologie – Ein neues Konzept zur Ultraschallbildgebung,” 9. Workshop - Automatisierungstechnische Verfahren für die Medizin (Automed), Fortschrittsberichte VDI, Reihe 17, Zurich: 2010, pp. 47-48.