Robots
The Chair of Ergonomics has three robotic systems in different fields of application and research. The portfolio ranges from stationary industrial robots to highly dynamic mobile robot systems.

Autonomous robot: Turtlebot 2i



The Turtlebot 2i is a ROS programmable research platform. It consists of a Kobuki base, an Intel NUC processor and is equipped with an Orbbec Astra RGB-D depth camera. Additionally, the Astra body tracking SDK is available to the chair. In the course of initial work, this platform was equipped with human-aware navigation. The robot can autonomously move to variable positions at the Chair of Ergonomics using SLAM technology. In contrast to the other robot models used at the chair, this model offers the possibility to integrate motion patterns into autonomous driving behaviors. Such a motion design was also presented at the automatica sprint 2021 trade show (see video).
Mobile Robot System: Parallax Stingray
Due to its medium size (280 mm x 330 mm x 140 mm, approx. 1 kg), the Parallax Stingray is suitable for a variety of studies, in particular investigations on robotic movement behavior. The system can currently be controlled either by programming an Arduino microprocessor or by using the Unity software environment in combination with motion detection from the HTC Vive hardware. The agile robot has the greatest possible scope for movement design. The front wheels are driven by two separate motors. In the back it has an omni-directional wheel, which also makes it possible to turn on the spot. It can display both precise, wide-area trajectories and movement patterns in confined spaces. A maximum acceleration of approx. 1.2 m/s2 and a maximum speed of approx. 2 m/s can be achieved.


The Parallax Stingray was used, for example, in a study to investigate human guidance. Great importance was attached to the implementation of human movement parameters in terms of acceleration, speed and trajectory selection; Source: Jakob Reinhardt
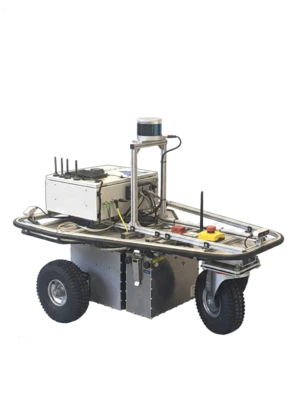
Innok Heros 223
The Innok Heros 223 is the largest mobile robot running at the Chair of Ergonomics. With a length of approximately 1 m, a width of around 70 cm, and a weight of about 80 kg, the system is particularly well suited for studies involving realistic dimensions and dynamic behavior, representing, e.g., an intralogistics setting. The robot is programmed using ROS and is equipped with an extensive sensor suite comprising a LiDAR, a bumper, and three Intel RealSense RGB-D cameras. This enables autonomous navigation using SLAM.
The Innok Heros 223 features a modular design and can be equipped with various attachments for different experimental scenarios. These can include a short-range projector for displaying projections in the robot’s vicinity, as well as interchangeable covers that allow larger external dimensions and thus increased mass to be simulated. The robot uses a differential drive system and reaches speeds of up to 2 m/s, approximately twice the typical human walking speed.
To date, the Innok Heros 223 has primarily been used in research on coexistent interactions of humans and robots in industrial and public settings. In particular, it is employed to investigate safety, efficiency, satisfaction, acceptance, and trust in encounters with (highly) dynamic mobile robots.
Collaborative Industrial Robot: Franka Emika Panda
The collaborative robot Franka Emika Panda is used for studies on human–robot cooperation and collaboration as well as telemanipulation. The robot features seven degrees of freedom, a reach of approximately 855 mm, and a payload capacity of up to 3 kg, enabling high flexibility and dexterity in shared workspaces with humans. Thanks to its integrated force and torque sensing in all joints, the Panda allows for sensitive, safe interaction and precise manipulation. Its compact design and high control accuracy support both autonomous and user-guided (teleoperated) scenarios. As a result, the Franka Emika Panda is particularly well suited for experimental investigations of coordinated manipulation tasks, shared action control, and safety aspects in human–robot collaboration.

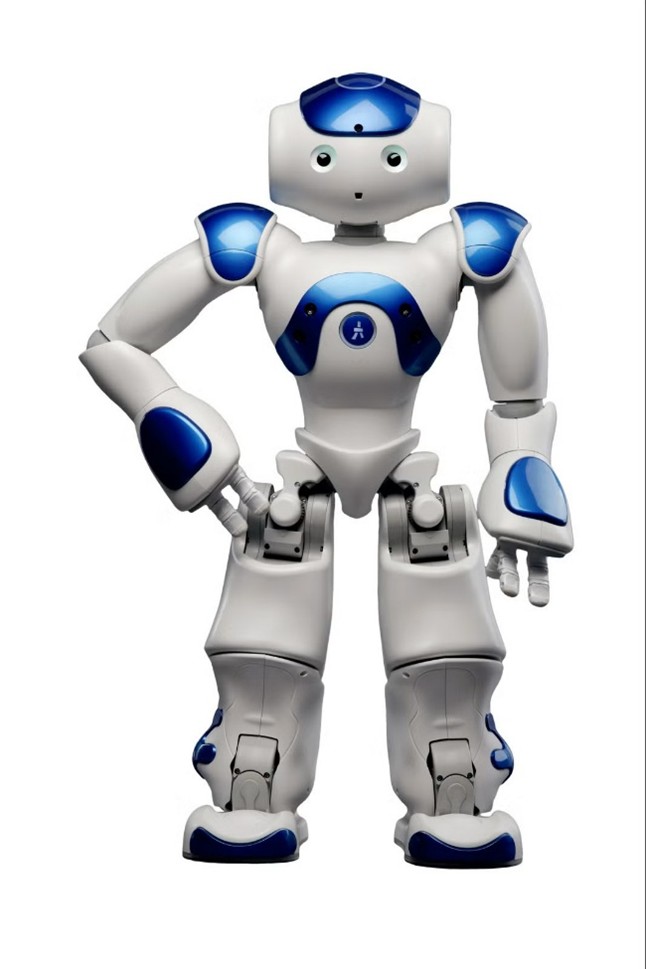
Social Robot: SoftBank NAO
The humanoid robot NAO by SoftBank Robotics is used to study human–robot interaction with a particular focus on social interaction aspects. NAO is approximately 58 cm tall, weighs around 5.4 kg, and features 25 degrees of freedom, enabling expressive and human-like movements. The robot is equipped with multiple tactile sensors, speakers, microphones, and two HD cameras, and supports speech perception, speech output, and gesture recognition. Its integrated computing unit allows for autonomous interaction as well as integration into experimental control architectures (e.g., Wizard-of-Oz approaches). Due to its childlike appearance and clearly interpretable behaviors, NAO is particularly well suited for studies on social perception, communication, and acceptance in human–robot interaction.
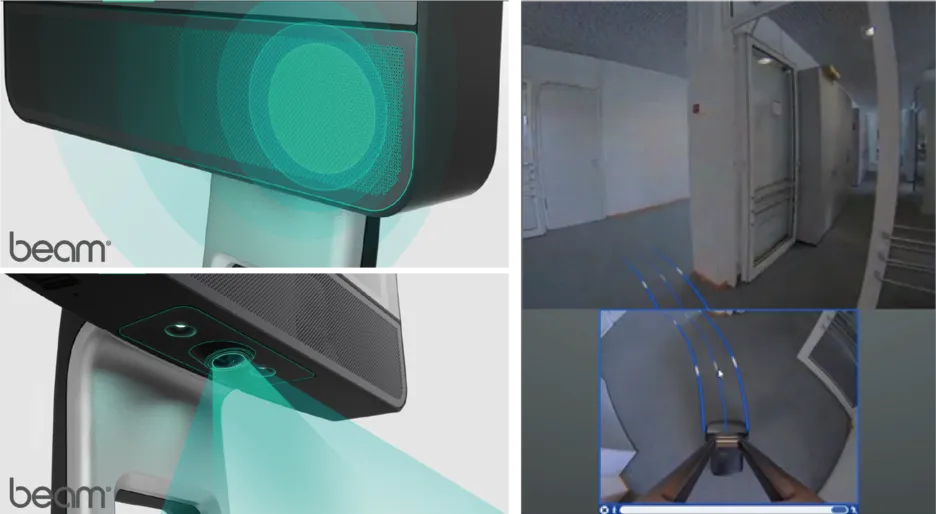
Telepresence System: Suitable Technologies Beam
The telepresence system Beam (enhanced) from Suitable Technologies is used to investigate social interactions in Wizard-of-Oz experiments (134.4 cm x 21.7 cm x 41.7 cm, 17.7 kg). The system has a running time of 7 hours, uses two integrated WiFi antennas for communication (dual-band 802.11 a/b/g/n, LTE available via USB) and reaches top speeds of approx. 1 m/s. The kinematic structure with two driven wheels in the front and two trailing castor wheels is similar to that of the Parallax Stingray. Clear sound reproduction on both sides of the connection through three forward and one backward directional microphone (incl. echo and noise cancellation) is available. The specially designed integrated speakers enable clear and natural sound reproduction. Two HDR cameras provide a wide forward and downward viewing angle to make driving with the beam safe and easy.
Industrial Robot: Reis RV20-16
Together with the Chair of Automation and Information Systems at the Technical University of Munich, the Chair of Ergonomics owns and operates a Reis RV20-16 industrial robot (6-axis articulated-arm robot). The system has a maximum load of 16 kg (additional load axis 3 10 kg, axis 2 20 kg, axis 2+3 20 kg, axis 1 30 kg), achieves high speeds (axis 1 200 °/s, axis 2 165 °/s, axis 3 150 °/s, axis 4 450 °/s, axis 5 450 °/s, axis 6 500 °/s) with high repeatability accuracy of ± 0.05 mm under an average power consumption of 1.6 kVA. Weight of the basic unit (without control unit and stand plate) is 220 kg.
