Tim Lueth's Research Page
Last change: Mar-25, 2026 by Tim C. Lueth
Research in Medical Robotics, AI, and Automated Design
Prof. Tim Lueth began his scientific career after completing his studies in 1989, focusing on neural networks, signal theory, language compression , and supervised learning. During his doctoral research (1989–1993), he specialized in Computer-Aided Manufacturing (CAM), followed by postdoctoral work (1993–1997) on autonomous mobile assembly and manipulation robots within the DFG Collaborative Research Center 314 “Artificial Intelligence and Robotics.”
Since 1997, as Professor of Medical Robotics and Navigation at Charité and Department Director at the Fraunhofer Institute IPK, Lueth pioneered the concept of hands-on robotic systems for surgical environments. His team developed the first certified tactile surgical robots for cranial operations (2000). The first commercially successful dental navigation system, RoboDent, was created in 2001 for Straumann AG. In 2003, his group realized the first 3D C-arm system (Vario 3D) for Ziehm Imaging.
Key collaborators during this period included Andreas Hein, Stefan Weber, Olaf Schermeier, and Ralf Tita. Clinical partners were Jürgen Bier, Martin Klein, Frank Hölzle, Ralf Sodian, Norbert Hosten, Detlef Hildebrand, and Gero Strauss.
Since 2005, Lueth has been Professor in the Department of Mechanical Engineering. In 2006, his group developed the first ENT-dental navigation system for Karl Storz GmbH. In 2013, his research influenced developments later integrated into MAKO (Stryker).
Current Research Focus
- Generative AI for automated design, documentation, manufacturing, and certification of robotic systems
- Development of the SGLib design library for MATLAB (since 2012)
- Design of medical robots / assistant devices (since 1997)
- Integration of MATLAB interfaces between SGLib and OpenAI services via API
- Automation of scientific workflows using AI
- Promotion of young researchers and encouragement of academic entrepreneurship
Selected videos of results of Tim Lueth and his research groups 1993 - today
Note 2025: All videos on this page represent the cutting edge of technology at the time and are real research results. Tim Lueth explicitly distances himself from the tendency in science to promise spectacular and revolutionary technology that is supposedly on the verge of a breakthrough for years and decades. We prefer to show real research results that may one day become products outside the university and promote the start-up scene.
Startup Company FORMOVE GmbH - Foundation for Physical AI (2026)




Project: Startup company FORMOVE GmbH – Foundation for Physical AI
Founder involved: Konstantin Ryan, Julian Ilg, Alex Oldemeier
Company background: Konstantin Ryan and Julian Ilg both worked as research assistants and Exist founders at the MIMED Chair and completed their doctoral theses with flying colors. Dr. Ryan earned his doctorate between 2020 and 2024 with 3D-printed light metal exoskeletons, while Julian Ilg earned his between 2021 and 2026 with a full-body sensor suit. Its application in a patient study also led to a publication in Nature Data Science in 2026. At the same time, they were active as founders in the PhysioMio project. Only thanks to FORMOVE's technology is it possible to program the ever-growing number of humanoid robots in real-world applications at short notice by using a novel physical AI process that combines complex human movement sequences with vision to translate them into movements of the humanoid robots. Co-founder Alex Oldemeier came from Google.
Dr.-Ing. Yilun Sun has been appointed a professor position at Tongji University in Shanghai (2026)




MIMED congratulates its long-standing colleague Dr. Yilun Sun on his appointment as associate professor at Tongji University in Shanghai, China. As a doctoral student and postdoctoral researcher, he was a teaching assistant for the course “Mathematical Software Tools”/“Numerical Software Tools for Engineers” for many years. We wish him all the best in his new position and hope to stay in touch.
German Start-ups with MIMED Background Achieving Global Recognition(2025)

In 2025, Julian Pracaeus, together with his partners Alex Vasilev and Julian Bernard, successfully sold their start-up Laralab (now heart.ai) to the U.S. company Abbott. The transaction was supported by Quantum Partners (Andreas Brinkrolf) and the law firm Dechert LLP (Federico Pappalardo).
Meanwhile, Max Dingler in his start-up FuTrue are expecting a visit from Bavarian Minister President Markus Söder in December 2025. It is hoped that the Minister President will recall the innovative MIMED robots presented in 2023.
Another remarkable success story is AUMATIS, founded by Felix Pancheri and Christoph Rehekampff. As one of the highlights of the Formnext 2025 trade fair, AUMATIS exemplifies the growing international recognition of German technological innovation.
Rescue robotics for disaster response in hazardous or contaminated areas (2025)
Since 2023, as part of a European defense project, we have been working on automating the rescue of people from inaccessible, damaged, or contaminated areas and supporting first responders so that as many people as possible can be rescued from crisis areas as quickly as possible and taken to a medical care facility within the first 60 minutes. (Christoph Parhofer, Maximilian Miller, Julius Ambros, Carolin Müller)


MIMED e-Hotrod joins the Wenckstern Munich Hotrod Fleet (2025)
Video 2025: The e-Hotrod was developed in 2022, but it took almost three years for it to be approved as normal street car. The reason for this is unclear regulations and conflicting information and requirements from the approval authorities. We also mourn the loss of Maik Wenckstern, who passed away in December 2024.
On a positive note, the MIMED Hotrod is now part of the Munich fleet at Hot Rod Fun with Stephan Bredenkamp and Marcel Stockhecke. Markus Huber did most of the work at MIMED involved in its development and approval


Humanoid Robots – Times have changed (2025) - Be careful what you wish for
While humanoid robots were presented at trade fairs in 2022 but were not available for purchase, it was possible to buy them in 2024. We installed a device at the chair in 2025 to inspire students and identify the problems that arise when you have telegenic technology that is desperately looking for a task. We encourage all students to apply for a job to show in their CVs that they were already using and programming these devices in 2025.
On the other hand, we would like to point out that not only the positive aspects but also the risks of using humanoid robots must be taken into account.




Text Book on Surgical Navigation and Robotics (2024)


Started by Tim Lueth in 2006, the textbook on Surgical Navigation and Robotics, which was sent to Springer Verlag in 2023, will finally be published in 2024. It is thanks to Mattias Träger, co-author and book project manager, and also Renate Heuser, Chief of MIMED Administration, that the textbook will finally see the light of day.
Startup Company Aumatis GmbH (2023)




Project: Startup Company Aumatis GmbH
Founder involved: Christoph Rehekampff and Felix Pancheri
Company Background: Following impressive results at the university chair in converting 3D-printed plastic components into aluminum (lightweight structures) or bronze (springs) with only 0.2 mm wall thickness, Christoph Rehekampff and Felix Pancheri founded the company Aumatis in 2023. Their goal is to develop a fully automated desktop machine for material transformation, enabling melting temperatures above 800 °C to be achieved even in office environments—engineering offices or research laboratories—for the production of durable assemblies.
MIMED robots herald the post-corona semester with MP Markus Söder (2023)


In 2023, the Technical University of Munich (TUM) resumed in-person teaching. During the opening ceremony, Minister President Markus Söder, Science Minister Dr. Markus Blume, and TUM President Dr. Thomas Hofmann created a demonstration using the MIMED technology. A 3D-printed metal robot struck the semester bell, symbolizing technological renewal. Prof. Tim Lueth showcasing an easily programmable lightweight robot and acknowledging Bavarian funding for lightweight robotics. Christoph Parhofer was responsible for the technical implementation and system integration.
Navigated Cardiac Catheter Guidance (2022)
Video 2022: Navigated Cardiac Catheter Guidance with Virtual Endsocopy (2:30 Min)
The rights of this video belong to Cardiac Clinic Lahr near Freiburg (Prof. Dr. Ralf Sodian)

Dr.-Ing. Franziska Klein has been appointed a professor position at University of Applied Science at Rosenheim (2022)




All colleagues at MIMED are proud that Franziska Sophie Klein, a long-time scientist at the chair and also in university committees, has not only written an outstanding doctoral thesis on the fully automated registration of patients for navigated ENT surgeries, but has also accepted a professorship at the University of Applied Science at Rosenheim. Even after completing her doctorate during the COVID-19 pandemic, she continues to come up with good ideas for the use of technology.
MIMED's e-Hotrod based on the Wenckstern combustion engine Hotrod (2022)




Involved scientists: Markus Huber, Maik Wenckstern, Stephan Bredenkamp, Marcel Stockhege, Tim Lueth
Objective: To determine whether it is possible to build an e-hot rod with road approval (88 km/h, 100 km range), even if new transmission and drive concepts must be developed. The mini hot rods from Wenckstern are equipped with an 11 kW combustion engine.
Results: After Tim Lueth privately purchased a hot rod from Wenckstern at the end of 2021, the idea quickly emerged to create an e-hot rod for city driving that could reach nearly 100 km/h, travel 100 km, and be charged in 10 hours at 220 V. Tim Lueth’s Zero FX motorcycle has a motor and battery that theoretically fit into the vehicle and can be power-limited. Maik Wenckstern and Stephan Bredenkamp were quickly enthusiastic about the idea, and Wenckstern provided a vehicle for conversion. Markus Huber designed and built the remarkable electric hot rod at MIMED. Already in July 2022, Maik Wenckstern, Stephan Bredenkamp, and Marcel Stockhege were able to test drive it in front of the MIMED building.
Endovascular "over-the-wire" tele-robot for catheter interventions (2022)




Project: Endovascular "over-the-wire" telemanipulation robot for interventional radiology and cardiac interventions
Scientists involved: Philipp Paprottka, Ralf Sodian, ErgoSurg team, Tim Lueth
Objective: To reduce radiation exposure for interventional radiologists and cardiologists, catheter systems should be operable by medical staff outside the intervention room, potentially even over long distances. For this purpose, several wires and catheters must be telemanipulated within and relative to each other inside a patient’s vascular system. A second research topic was the idea of designing the complete robot using the SG-Lib as an automatic design script.
Results: In contrast to the CORINDUS vascular robot (Israeli company, founded in 2002 by Rafael Beyar, Technion, acquired by Siemens for 1 billion euros in 2019), the new design uses an "over-the-wire" instead of a "rapid-exchange" technology and operates without custom-specific cartridges, being compatible with any catheter system on the market. The project was on hold from 2023 to 2025, as Siemens’ disappointment with the Corindus acquisition was seen by investors as a sign of a "robot-looking-for-a-task" or "solution-desperately-seeking-a-problem". The M&A transaction of ErgoSurg may also have contributed. In 2026, the system design was restarted as a research project. The robot was completely designed using the SG-Lib between March 2022 and May 2022. Although many additional functions had to be written during this period, the design, 3D printing, and assembly took place during the COVID-19 pandemic at Tim Lueth’s home. The conversion into a medical product took place at ErgoSurg in Ismaning. Philipp Paprottka was responsible for clinical integration.
Development of Low-cost Light-weight Robots (2021)
In 2021, many different versions of the lightweight robot were created, the first version of which was developed by Yannick Krieger in 2020. Later robot version were created in the team of Christoph Parhofer. The Christmas video of the lightweight metal version was created using Felix Pancheri's new combination of 3D printing and metal casting technology. A copy of the robot was built for the FhG IGCV (Professor Wolfram Volk).


MEDICA/COMPAMED trade fair showcases complete navigation and robotics concepts for medical applications (2021)
At the end of the coronavirus pandemic, we were able to present the entire spectrum of surgical navigation and robotics experts again for the first time at the world's largest medical trade fair in Düsseldorf. The exhibition stand was financed by ERGOSURG.


Topology-Optimization-Based Design of Solid-State-Joint-Actuated Complex Mechanisms (2020)
While Tim Lueth and Franz Irlinger are working on modern design methods for articulated gears with complex spatial constraints, Dr. Yilun Sun from MIMED achieved a breakthrough with the parallel approach in his work Topology-Optimization-Based Design of Solid-State-Joint-Actuated Complex Mechanisms (2020). Within 60 seconds, 2.5D grippers or tongs for line or surface loads are designed that are movable thanks to solid-state joints and can therefore be printed as a monolithic structure.

Telemanipulator for catheters and guide wires in radiology and cardiology (2020)




Project: Telemanipulator for catheters and guide wires in interventional radiology and cardiology
Scientists involved: Philipp Paprottka, Ralf Sodian, ErgoSurg team, Tim Lueth
Objective: To reduce the radiation exposure of treating radiologists and interventional radiologists during diagnosis and therapy, an inexpensive, preferably disposable robotic system is to be developed that allows the wires and catheters to be moved by a robot via a telemanipulation console at a greater distance from the CTs or angiographs.
Results: An initial system will be implemented in 2020 and later evaluated for suitability at TUM Hospital MRI (Chief Physician of Interventional Radiology Prof. Dr. Philip Papprottka) and at the Lahr Heart Center (Chief Physician Prof. Dr. Ralf Sodian).
Handheld Intranasal Endoscopic Instrument Telemanipulator (2019)




Project: Handheld Intranasal Endoscopic Instrument Telemanipulator (2015-2021)
Participating scientists: Suat Cömert, R. Roth, V. Ameres, Gero Strauß, Mattias Träger, Tim Lueth
Objective: Based on experience with printed mechanical manipulators for single-port surgery, the aim was since 2015-2021 to investigate whether the concept of snake-like manipulator arms could also be transferred to ENT surgery using a handheld instrument with a pistol grip. This manipulator would then be used to guide any instruments inserted into the paranasal sinuses to the site of the procedure.
Results: Suat Cömert, who had already worked as a student at JHU with our cooperation partner NSF Research Center CISST, Russel H. Taylor, Greg Hager, Peter Kanzanzides, Baltimore, USA), is conducting extensive experiments on the transfer of 3D-printed polyamide structures into wire-eroded metal structures, which can be designed to be significantly smaller. The prototype was ready for use in 2018, and the handheld manipulator system made of PEEK with internally guided flexible instruments was ready for use in 2019.
Selection of our publications:
- Coemert, S., Yalvac, B., Bott, V., & Sun, Y. (2021): Development and validation of an automated FEM-based design optimization tool for continuum compliant structures. *International Journal of Advanced Manufacturing Technology*, Springer.
- Coemert, S., Roth, R., Strauss, G., & Schmitz, P.M. (2020): A handheld flexible manipulator system for frontal sinus surgery. *International Journal of Computer Assisted Radiology and Surgery*, Springer.
- Coemert, S., Ameres, V., Roth, R., Strauss, G., & Schmitz, P.M. (2020): Concept and realization of a handheld manipulator system for transnasal middle ear surgery. *Procedia CIRP*, Elsevier.
- Coemert, S., Burkhardt, S., Rodewald, K.S., & Lueth, T.C. (2020). A process towards eliminating cytotoxicity by removal of surface contamination from electrical discharge machined nitinol. *Procedia CIRP*, Elsevier.
- Coemert, S., Veith, L., & Strauss, G. (2019). Anatomical characterization of frontal sinus and development of representative models. *Proceedings of the 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society
- Coemert, S., Traeger, M.F., Graf, E.C. & Lueth, T.C. (2017): Suitability evaluation of various manufacturing technologies for the development of surgical snake-like manipulators from metals based on flexure hinges. *Procedia CIRP*, Elsevier.
- Coemert, S., Alambeigi, F., Deguet, A. et al. (2016): Integration of a snake-like dexterous manipulator for head and neck surgery with the da Vinci research kit. *Proceedings of the Hamlyn Symposium on Medical Robotics*, ResearchGate.
- Coemert, S., Gao, A., Carey, J.P. et al. (2016): Development of a snake-like dexterous manipulator for skull base surgery. *Proceedings of the 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society*, IEEE.
Tim Lueth is appointed Fellow of the University of Tokyo (2019)




Project: Tim Lueth is appointed Fellow of the University of Tokyo (2019)
Involved scientists: Hajime Asama, Tim Lueth
Background: In 2019, Tim Lüth is appointed Fellow of the University of Tokyo (Todai) in the Department of Precision Engineering. The long-standing scientific collaboration since 1994 with Professor Hajime Asama, as professor at Todai, is certainly decisive. On the occasion of the joint workshop of the Technical University of Munich with the University of Tokyo in 2019, the award is announced, and Professor Lüth is invited to give a summer lecture series on medical robotics, 3D printing, and mechanism design in Hiroshima and Tokyo. He is pleased that, following his Visiting Professorship (1994/95) at the ETL in Tsukuba through the private invitation of Hajime Asama, he can once again visit important cultural sites before returning after a farewell party from Tokyo and Professor Asama.
Ligament- and tendon-free 1:1 motion models of patient-specific knee devices (2019)


Project: Ligament- and tendon-free 1:1 motion models of patient-specific knee devices
Scientists involved: Alexandra Mercader, Amir Bigdeli, Heinz Röttinger, Tim Lueth
Objective: The aim of the research is to analyze the causes of the high resection rate of patient-specific implanted knee joints. Our hypothesis is that the postoperative knee joint kinematics with the knee replacement do not correspond to the original knee joint kinematics. For this reason, we want to use a stereotactic measurement system to measure the relative spatial movement of the lower leg bone to the thigh bone in a patient and design a four-joint that can emulate these patient-specific knee movements without the ligamentous apparatus of the human joint. We “print” the model of the lower leg bones and thigh bones with the movable four-joint in a 1:1 scale so that the knee can be spread open as in a real operation and then the original implants, milling templates, and surgical navigation systems can be applied to this knee model. The four-joint mechanism allows knee movement to be simulated on the 1:1 model even without ligaments, and the fit of the implant to be checked. This makes it possible to test the correct functioning of the previous clinical procedure in advance on a 1:1 model. Results: Software for spatial recording of relative leg movement was developed based on an optical stereo camera (NDI). Leg movement was recorded using bone surface models of the patient's knee. A four-joint synthesis method was used to develop joint kinematics that can follow individual knee movement and perform it even without the ligamentous apparatus (tendons and ligaments). The kinematics were automatically constructed and linked to the bone surface models. The 1:1 model of the bones was then additively manufactured with the four-joint.
Other important research teams at that time: none to date
Selection of our publications:
- Mercader, A.L.V. (2023): A method for the mechanical validation of surgical planning in knee joint replacement therapy. *Technical University of Munich*, dissertation.
- Mercader, A., Röttinger, T., Bigdeli, A., & Lüth, T.C. (2021): A patient-specific 3D model of the knee to compare the femoral rollback before and after total knee arthroplasty (TKA). *Journal of Experimental Orthopaedics*, Springer.
- Mercader, A., Röttinger, T., Bigdeli, A. & Lüth, T.C. (2021): Visualization of patient’s knee movement and joint contact area during knee flexion for orthopaedic surgery planning validation. *Computer Methods in Biomechanics and Biomedical Engineering: Imaging & Visualization*, Taylor & Francis.
- Sun, Y., Mercader, A., & Lüth, T.C. (2020): Design of 3D-printable nasopharyngeal swabs in Matlab for COVID-19 testing. *Transactions on Additive Manufacturing Meets Medicine*, Infinite Science.Mercader, A., Leyerer, A., Irlinger, F., & Lüth, T.C. (2019): Deep learning for four-bar synthesis using the Fourier coefficients of the coupling curve. *Conference Proceedings*, d-nb.info.
- Mercader, A., Laudahn, S., & Lüth, T.C. (2019): A Mechanical Lower Limb Exoskeleton Prototype Synthetized with a Deep Learning Based Algorithm. *Conference on Biomedical Systems (CBS)*, ResearchGate.
- Mercader, A., Biersack, M., Sun, Y., & Lüth, T.C. (2019): A mechanical bed for elderly care to assist while standing, sitting, and lying. *IEEE International Conference on Robotics and Biomimetics (ROBIO)*, IEEE.
Team Sport - Long Distance Run (2018)




Project: Team Sport - Long Distance Run (2018)
Participating scientists: Yilun Sun, Dingzhi Zhang, Sonja Berensmeier, Veit Senner, Daniel Rixen, Wolfgang Polifke, Markus Lienkamp, Harald Klein - MIMED: Lucas Artmann, Simon Schiele, Konstantin Ryan, Julian Ilg, Christoph Parhofer
Objective: Does competitive team sport support scientific output and the professional career of scientists?
Results: While the team of MIMED assistants is still significantly smaller than the team of professors in 2018, it will grow larger every year after 2020.
Surgical navigation for 2D (LAT/AP) C-arm-based spinal surgery (2018)

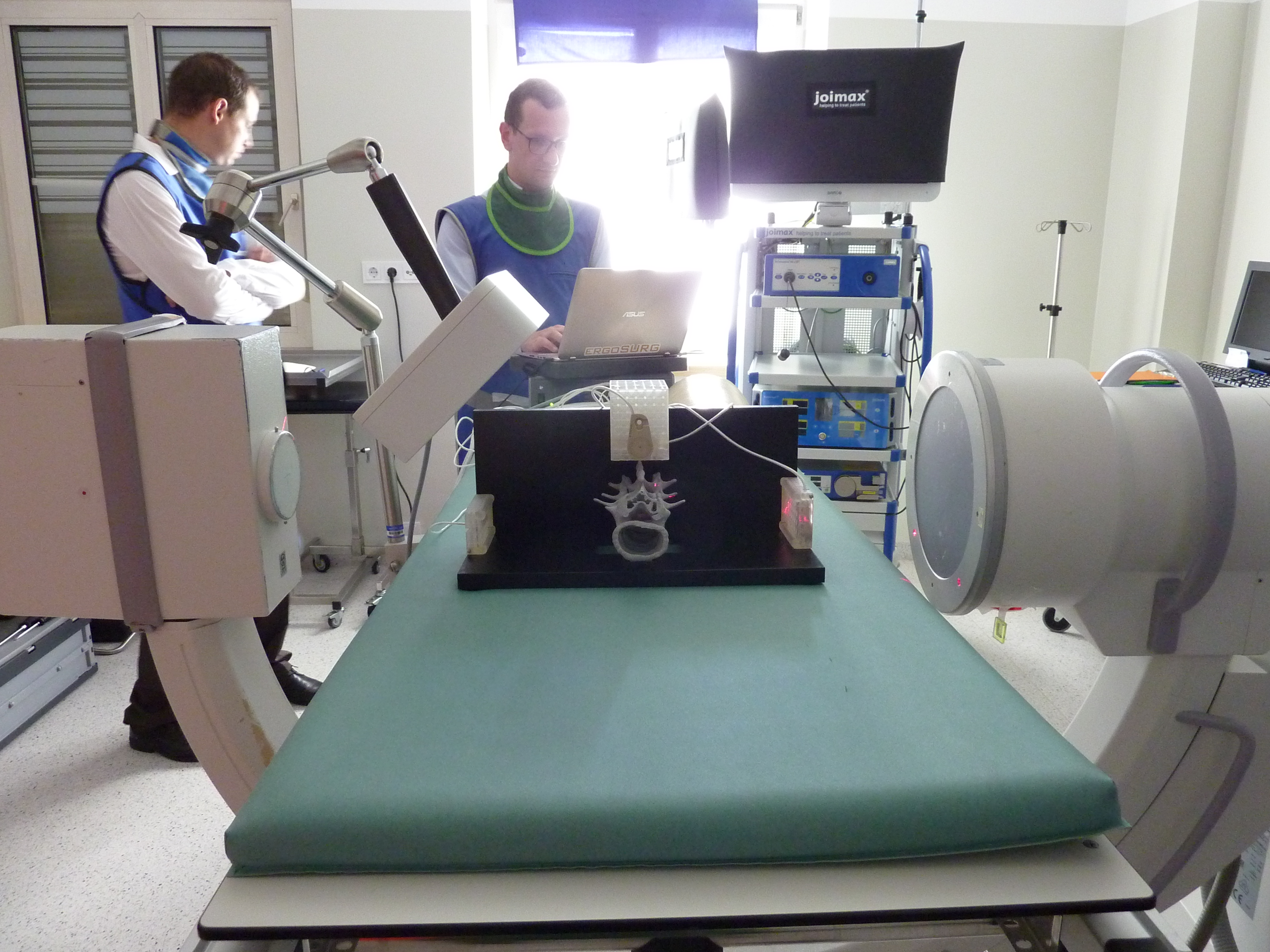
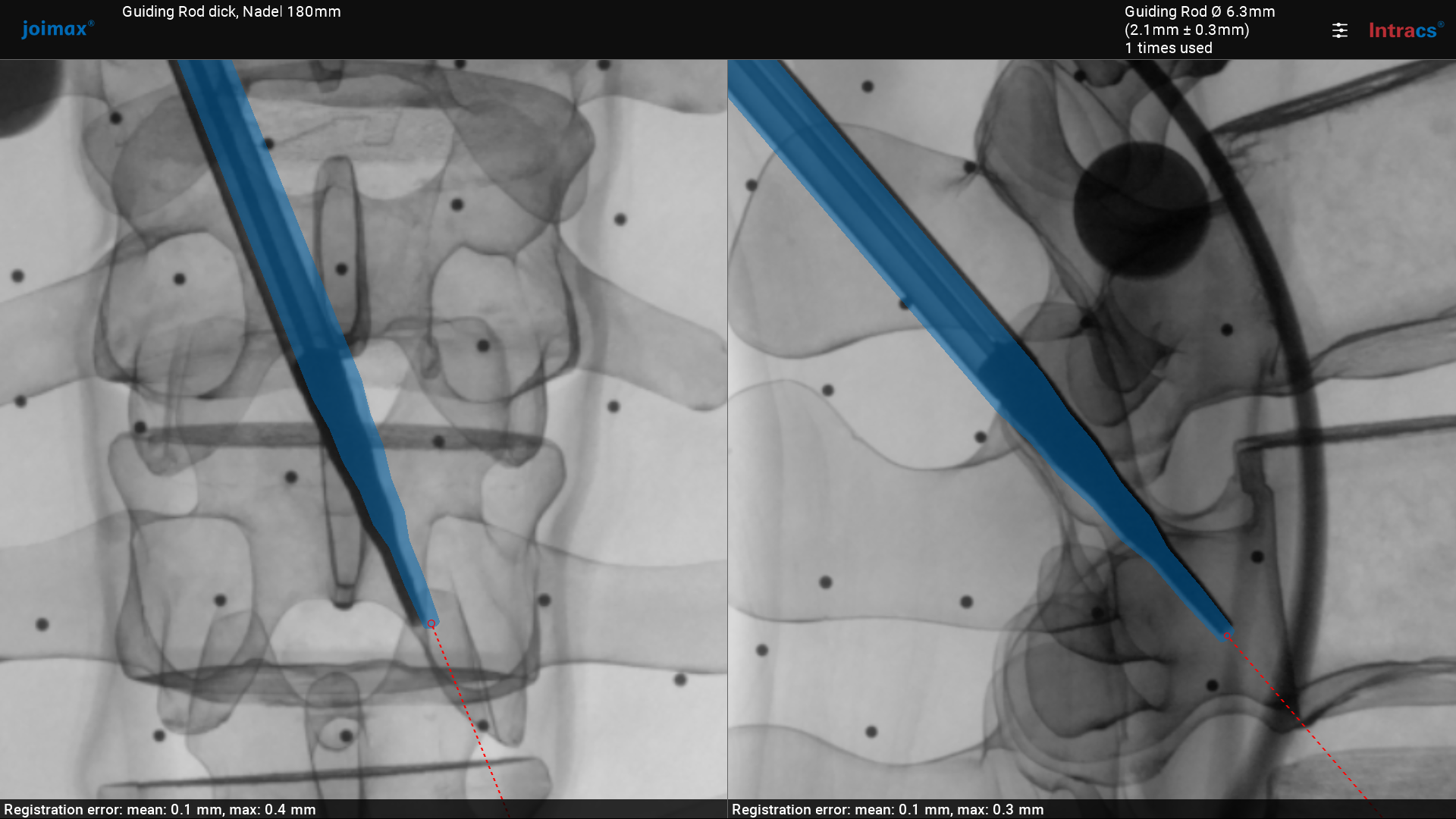
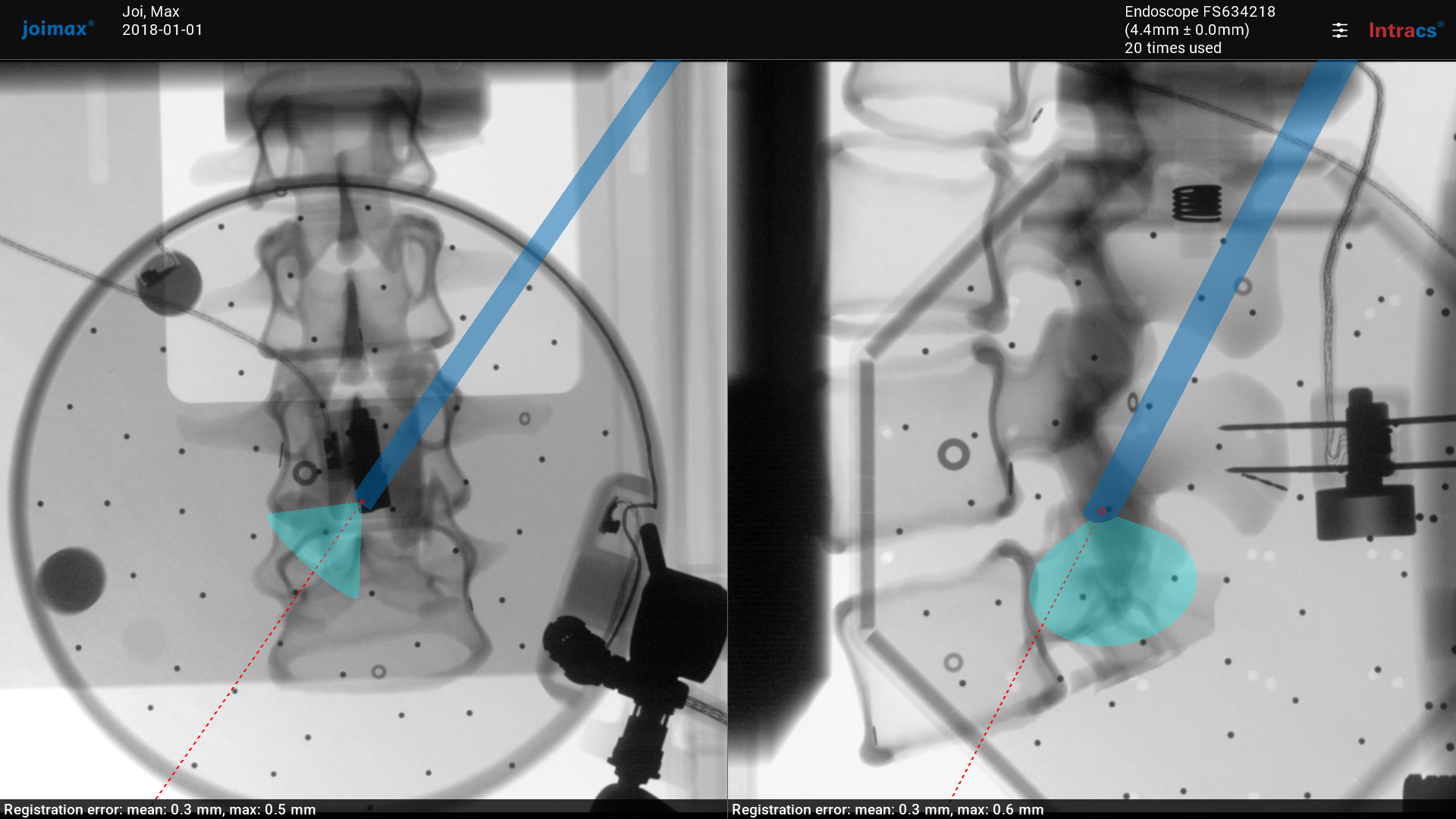
Project: Surgical navigation for C-arm-based spinal surgery
Scientists involved: WW, EL, SH, NS, JZ, BL, BZ, JZ, SS, CS, Tim Lueth
Objective: The objective was to develop a very fast, efficient, and easy-to-use navigation system for spinal surgery. Robust, reusable electromagnetic instruments must be used. The system must offer a way to co-register C-arm projection image data and CT/MRI-based volumetric image data.
Results: The Integrated Navigation Tracking & Control System received the 2019 Spine Technology Award from the North American Spine Society (NASS) in September 2019.
Selection of our publications:
https://www.odtmag.com/contents/view_breaking-news/2019-09-23/nass-news-joimax-wins-2019-spine-technology-award/
The system is certified and in regular clinical use worldwide.
Founding of the TUM Professors' Big Band: "Old's Cool BigBand" (2018)




Project: Founding of the TUM Professors' Big Band
Founding members: Sonja Berensmeier, Tim Lueth, Manfred Hajek, Christian Stinner, Harald Klein, Josef Winter, Lutz Renders, Michael Sattler, Martin Mensinger, Christoph Hirsch, Alex Holleitner
Objective: Is it helpful for professors to collaborate not only professionally but also musically, and is this exchange beneficial to science?
Results: After the TUM student big band was named the best up-and-coming jazz band, the professors also got interested. Starting with the Faculty of Mechanical Engineering, other colleagues from chemistry, medicine, and other faculties soon joined. Greg Hager (JHU/NSF) also played the trombone when the band was founded.
Startup Company Laralab GmbH/Abbott heart.ai (2017)




Project: Startup Company Laralab (2017)
Founder involved: Julian Praceus, Alex Vasilev, Julian Bernard
Company background: In 2017, Julian Praceus recognizes the growing importance of heart surgery using the geometry of cardiac anatomy and wants to develop planning programs for this purpose. He starts an EXIST project at the MIMED chair. The company wins the Digital Innovations start-up competition. Julian Praceus reorganizes the company and, together with Alex Vasilev and Julian Bernard, Laralab becomes a model of success.
Success story: The use of neural networks and deep learning for the automatic segmentation of anatomical regions whose boundaries cannot be determined using Hounsfield values becomes a key to success. The company becomes ISO 13485 and MDR certified before the first IIa products are launched. In 2025, the company is successfully sold to Abbot. With the support of Quantum Partners and the law firm Dechert (which also brought the start-up Voxel-Jet to the New York Stock Exchange in 2013).
Fully automatic patient registration with a laser-assisted stereo camera (2013-2017)




Project: Fully automatic patient registration with a laser-assisted stereo camera (2013-2017)
Participating scientists: Franziska Sophie Görlach-Klein, Tim Lueth
Objective: A major advantage of optical navigation over electromagnetic navigation is the theoretical possibility of fully automatic surface registration of patients via the visual axis. This requires an automatically controllable active camera head (Krinninger-Hurka) and a laser pointer. The aim of the work in 2013 was to find the right lasers with which such a system would be practically possible, to build it, and to validate it.
Results: In 2015, Fraziska Klein succeeded in building an initial system in which lasers with a coordinated wavelength generated a reflection point on the skin, which allowed measurement with the stereocamera. Whereas previous systems required the surgeon to move this laser pointer, this step was eliminated by the active camera head with integrated laser set. The laser wavelength must take the patient's skin color into account, and the camera head evaluates the laser specifically to capture strong height contrasts. The system has not yet become widely accepted, as electromagnetic navigation grew faster than optical applications from 2015 onwards.
Other important research teams at that time: Brainlab GmbH, ErgoSurg GmbH
Selection of our publications:
- GOERLACH, Franziska S., et al. Evaluation of pattern-based point clouds for patient registration—A phantom study. In: 2015 International Conference on Intelligent Informatics and Biomedical Sciences (ICIIBMS). IEEE, 2015. pp. 392-397.
- GOERLACH, Franziska S., et al. Detection of surface points with an 850nm laser and an NDI stereo camera. In: 5th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics. IEEE, 2014. pp. 719-725.
- GOERLACH, Franziska S., et al. Multi-layered, 3D skin phantoms of human skin in the wavelength range 650–850nm. In: 2015 International Conference on Intelligent Informatics and Biomedical Sciences (ICIIBMS). IEEE, 2015. pp. 250-256.
- GOERLACH, Franziska S., et al. Precision of near-infrared laser spot detection on different skin tissues featuring an NDI stereo camera. In: 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014). IEEE, 2014. pp. 303-308.
- GOERLACH, Franziska S., et al. Accuracy of Surface Point Detection With an 850nm Laser and NDI Stereo Camera. In: ASME International Mechanical Engineering Congress and Exposition. American Society of Mechanical Engineers, 2014. pp. V003T03A019.
Startup Company FitSeat (2016)
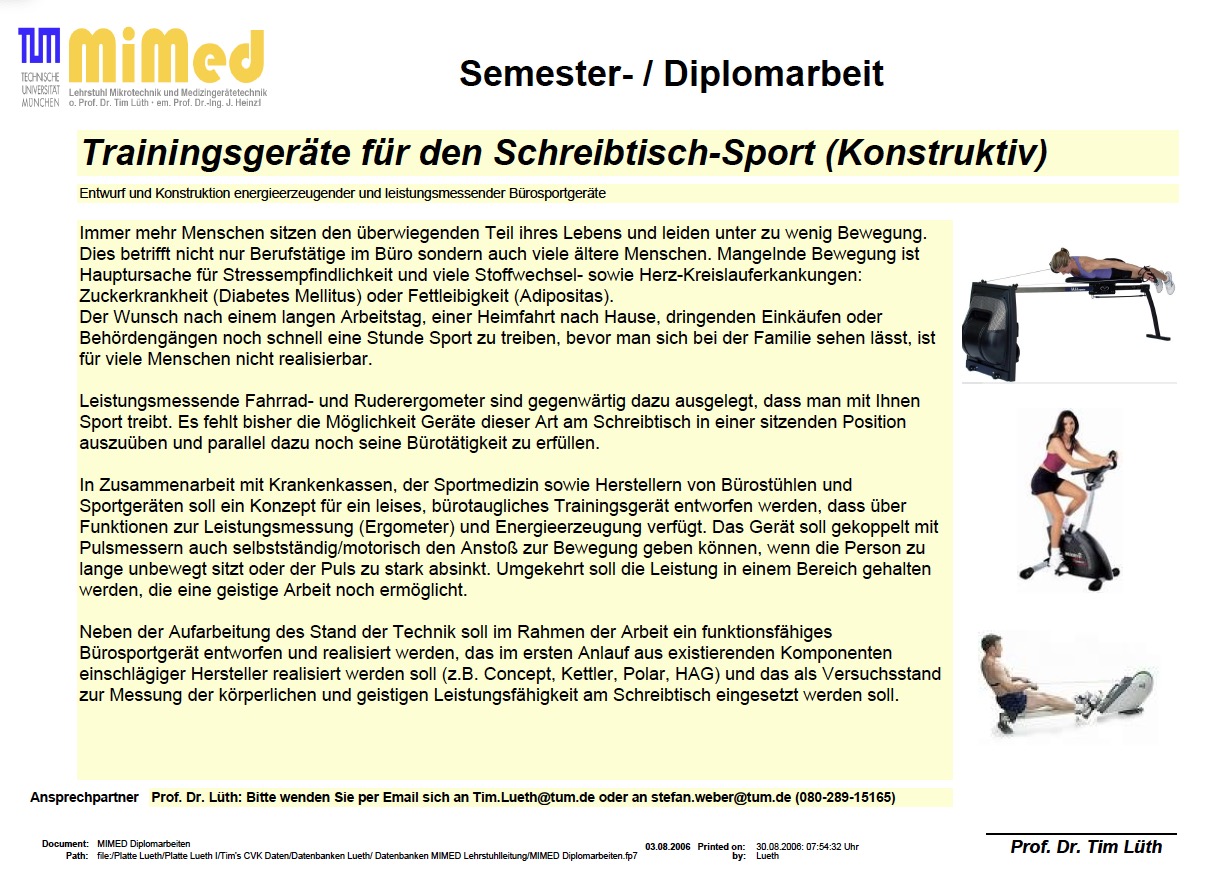



Founder involved: Dr.-Ing. Jan Gumprecht
Company Background: An idea from 2006 called "desktop sports" was turned into a first prototype by Lorenzo D'Angelo in 2011. By using it at his desk, Tim Lueth reduced his weight almost by 20 kg. The publication was submitted in 2012. However, the entrepreneurial vision was only realized by Jan Gumprecht, who founded the company FitSeat in 2016 after completing his doctorate at the chair.
Selection of our publications:
- Lorenzo T D'Angelo and Tim Lueth (2011): "Desktop Sport: Desk with Integrated Bicycle Ergometer and Cadence Feedback by Automatic Computer Screen Switch," submitted to IEEE Int'l Conference on EMBC
Navigated Augmented Video Endoscopy
Video 2016: Navigated Augmented Video Endoscopy with 45 degree Hopkins Endoscope (0:33 Min)
The rights of this video belong to ERGOSURG GmbH, Ismaning

Team Sport - Wake Boarding (2015)




Project: Team Sport - Wake Boarding (2015)
Participating scientists: MIMED Team, ERGOSURG Team, and Bioseparation Team (Sonja Berensmeier) and Dorian Walcher, Tim Lueth
Objective: Does competitive team sport support scientific output and the professional career of scientists?
Results: Alongside long-distance running, Wakeboarding is the team sport that has been practiced the longest, from 2014 to 2024, with breaks during and after the coronavirus pandemic, sometimes only by a smaller team. Every two weeks, the facility was booked exclusively for the team for two hours. Hardcore riders also train several times a week. Some kiteboarders do too, as do some kitefoilers and pumpfoilers. Thanks to Elisabeth Lindinger, Petra Lang-Siebeking, and Mark Siebeking. Cable skiing has been added since 2021. Sigita Rosovaite was training the ERGOSURG Team from 2022.
Snake-Like Tele-Manipulator (Robot) for Minimally Invasive Surgery and NOTES

Dr.-Ing. Houde Dai has been appointed a professor position at Fujian Institute, Chinese Academy of Sciences (2014)

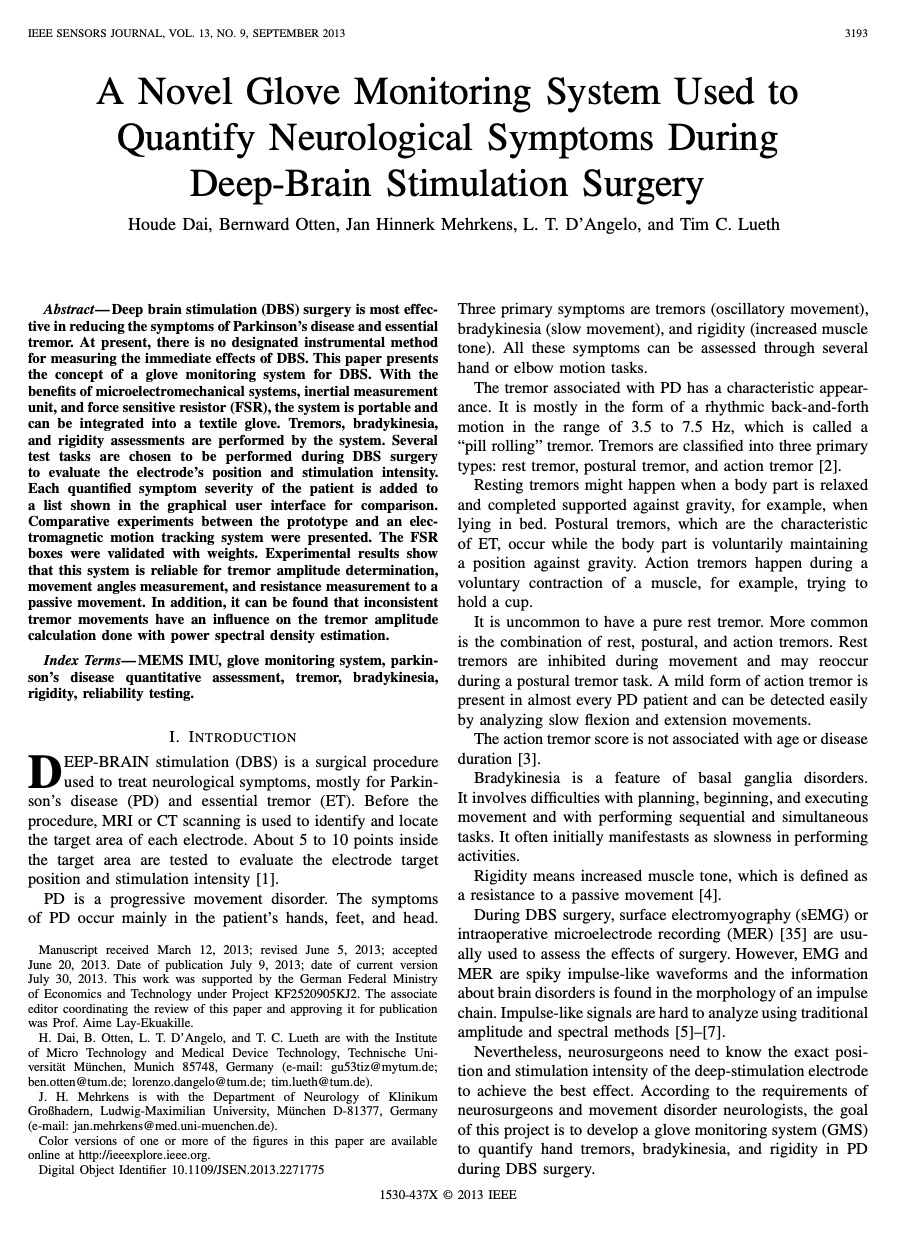


MIMED congratulates its colleague Dr.-Ing. Houde Dai on his appointment as professor at the Fujian Institute of Research on the Structure of Matter, Chinese Academy of Sciences. Houde Dai, invited from Shenzhen to Munich in 2009, remained at the chair until 2013 and published an exceptional amount of high-quality work on sensor technology for deep brain stimulation in Lorenzo D'angelo's AgeTech group. In addition to his doctorate, another highlight of his time in Munich was coming in second place in the dragon boat race in the Olympic Park.
Student Tutorial Video on Closing the Left Atrial Appendage
Startup Company Medineering GmbH/Brainlab Robotics (2014)




Startup Company Medineering GmbH/Brainlab Robotics (2014)
Founder involved: Dr.-Ing. Stephan Nowatschin and Dr.-Ing. Max Krinninger
Startup background: Dr. Stephan Nowatschin, who worked at MIMED until 2009, at ERGOSURG GmbH until 2011, and then at Karl Storz GmbH until 2013, founded Medineering GmbH in June 2014 together with Dr. Max Krinninger, who worked at MIMED until 2011. In June 2014, they began developing a robotic arm similar in size to the JACO robot, which has been marketed by ERGOSURG since 2011. Since ERGOSURG does not have marketing rights in the medical field due to contracts with KINOVA, Dr. Nowatschin and Dr. Krinninger are taking the opportunity to develop a medical robotic arm for ENT surgery.
Successful exit: We are proud of the spin-off of former MIMED employees/doctoral students. Dr. Stephan Nowatschin and Dr. Max Krinninger win 3rd prize in the 2014 Munich Business Plan Competition. Medineering GmbH is successfully sold to Brainlab AG in 2020 and continues under the new name Brainlab Robotics GmbH.
Other important startup teams at that time: Accrea Medical Robotics (Bartłomiej Stańczyk) Bartłomiej Stańczyk carried out an EXIST project ReMeDi at MIMED from 2019 to 2021.
Tim Lueth elected Dean/Vice Dean of Mechanical Engineering Faculty (2010-2020)




Administrative Activity: Tim Lueth elected Dean/Vice Dean of Mechanical Engineering Faculty (2010-2020)
Election: Tim Lueth was first elected Dean of the Faculty of Mechanical Engineering in 2010, then Vice Dean in 2012 and Dean again in 2013, then Vice Dean in 2017 and, following the dissolution of the Faculty of Mechanical Engineering, Head of the Department of Mechanical Engineering in 2020. He took office as Vice Dean in 2012 and as Dean in 2013. During his time as Dean, his deputy was Vice Dean Prof. Dr. Wolfram Volk.
Results: As dean, Tim Lueth achieved his goal of making the allocation of financial and human resources as well as rooms to professorships completely transparent, enabling allocations to be made according to a performance key that can be verified by everyone, which takes into account teaching in the basic study period, teaching in the main study period, and third-party funding acquired, and distributes a bonus for peer-reviewed publications. Below the dean level, there were institute representatives in a strategy group. All professors were invited to the faculty council meetings and, with rare exceptions, were present. The colleagues' wish was to raise approximately two third-party funding positions per budget item and not to allow any chair to grow/shrink to more than 30 academic staff (E13) or less than nine academic staff (3+6). All performance indicators (staff, third-party funding, exams, and publications) were recorded digitally (SAP, etc.) on an annual basis and made available to all professors. This began in 2013 and continued until the change of dean at the end of 2016. In 2020, the Faculty of Mechanical Engineering was merged into the School of Engineering and Design. The new Department of Mechanical Engineering was significantly smaller and no longer had the authority to allocate funds like the previous Faculty of Mechanical Engineering.
3D-Printing a 6DoF robot by lightweight structures (JACO Robot in SLS, 2012)
Video 2013: JACO Robot printed in 3D by Selected Laser Sintering (0.50 Min)
The rights of this video belong to ERGOSURG GmbH, Ismaning
Waypoint Guidance in Surgical Navigation (ENT)
The rights of this video belong to ERGOSURG GmbH, Ismaning

Team Sport - Dragon Boat Race (2011)




Project: Team Sport – Dragon Boat Racing (2011)
Participating scientists: The entire MIMED team
Objective: Does competitive team sports promote scientific work and the professional careers of scientists?
Results: The TUM/LMU eight-man rowing competitions somehow disappeared, and Jan Gumbrwecht founded a new team for the Munich dragon boat races in 2011. Initial training took place on office chairs in the MIMED foyer using broomsticks before the team took to the water. An excellent 2nd place in their first competition (boat number 4) demonstrates the team's spirit and fighting spirit.
Krupp Foundation funds research for elderly people with 3 Mio. € (2010-2015)



Project: Krupp Foundation funds elderly people research with 3 Mio. € at TUM (2009)
Objective: The aim of the research was to establish a permanent center for robotics and technology development to support independent living for elderly people. Ten years after awarding the Alfried Krupp Prize to Tim Lüth, the Krupp Foundation, under the leadership of Berthold Beitz, was ready to support Tim Lüth again, this time at the Technical University of Munich. The proposal, including the appointment of three new professorships at IMETUM (among them from the chair of Professor Hornegger, President of the University of Nuremberg), was approved in 2009.
Results: Immediately after the approval by the Krupp Foundation, the IMETUM building was reassigned from the topic of elderly people to a new focus on biomedicine, and the appointment procedures of the selected professors were not completed. Consequently, the Krupp Foundation reduced the funding and granted only 1 million euros directly to the MIMED chair. This funding laid the foundation for four doctoral theses and a long-term collaboration with the Kuratorium Wohnen im Alter (KWA) and the largest rehabilitation center in Japan, located in Kobe.
Tim Lueth is elected to the National Academy of Science and Technology (2010)

Following his official election to the German Academy of Science and Engineering (acatech) on April 27, 2010, Tim Lueth will be presented with his certificate of appointment on October 19th 2010.
Compact Endoscope Guidance Robot for Head Surgery (2008-2011)




Project: Development of a compact endoscope guidance robot for head surgery (2008-2011)
Participating scientists: Max Krinninger, Thomas Maier, Mattias Traeger, Gero Strauß, Andreas Dietz, Tim Lueth
Objective: Based on the concepts of the autoclavable Robo-Point robot (Dirk Schauer), the aim was to develop a small robot that could be attached to the operating table and guide an endoscope in 5 DoF, but in which the degrees of freedom could be achieved not by sequential kinematics as with the Robopoint, but by parallel kinematics in two planes.
Results: Max Krinninger built such a robot for the ICCAS in Leipzig, and TUM Mimed sold several copies of it to Karl Storz. The 1st serial production for Karl Storz has been completed by Mattias Traeger. The robot was clinically used and evaluated by Gero Strauß at Andreas Dietz's clinic in 2011. In 2014, Max Kinnninger and Stephan Nowatischin founded the medical robotics company Medineering GmbH.
Selection of our publications:
- Berger, T., Maier, T., Scholz, M., Lüth, T. (2016): Evaluation of a micromanipulator for middle ear surgery: A preclinical study. *Laryngo-Rhino-Otologie*.
- Neumuth, T., Meixensberger, J., Lüth, T. (2013): The "Surgical Deck": A new generation of operating rooms for ENT surgery. *Laryngo-Rhino-Otologie*.
- Krinninger, M., Maier, T., Berger, T., Dietz, A., & Lüth, T. (2012): Clinical use of a micromanipulator system: preliminary clinical experience in middle ear surgery. *HNO / PubMed*.
- Krinninger, M., Maier, T., Berger, T., Dietz, A., & Lüth, T. (2012): Clinical use of a micromanipulator. *HNO*, Springer.
- Schaller, S., Strauss, G., Krinninger, M., Hurka, F. et al. (2011): Influence of an auto-motorized optical navigation camera on the surgical workflow in ENT surgery. *Laryngo-Rhino-Otologie*.
- Schaller, S., Strauss, G., Krinninger, M. et al. (2011): The effects of a robot-guided navigation camera in ENT surgery. *Laryngo-Rhino-Otologie*.
- Krinninger, M. (2011): A system for endoscope guidance in ENT surgery. *Dissertation*, d-nb.info.
- Dietz, A., Krinninger, M., Lüth, T. (2010): A Modified Technique for FESS with an Endoscope Manipulator. *Otolaryngology–Head and Neck Surgery*.
- Krinninger, M., Strauß, G., Markert, M., Kraus, T., & Lüth, T. (2009): The kinematic design of the new endoscope manipulator system (EMS) for functional endoscopic sinus surgery and familiar techniques in ENT surgery. *World Congress on Medical Physics and Biomedical Engineering*, Springer.
Ultrasound integrated into the patient support and robot-assisted sonography (2010)

Project: Operating table cushion-integrated robot for minimally invasive ultrasound imaging and automatic tracking and focusing of instruments
Participating scientists: Jan Gumprecht, Thomas Maier, Roland Eckl, Jens-Uwe Stolzenburg, Tim Lueth
Objective: The system is characterized by the fact that the surgeon can take ultrasound images with a robot without the presence of an additional assistant in the operating room. The patient should lie on a soft pillow to bring the ultrasound waves into the body without air reflection and, after reflection, to the ultrasound head. The robot should be able to move and tilt the ultrasound probe within the cushion. The robot should be operable as a telemanipulator with a joystick, be able to execute movement commands, and automatically track defined sound echoes in the ultrasound images. The ultrasound can be focused on the instrument or a lesion.
Results: We were able to show that it is possible to use an XY mechanism with a tilting head to guide an ultrasound head together with it in a water container and to move it via a joystick and control signals, for example, to follow a marker in an ultrasound image.
Other important research teams at that time: Achim Schweikard, University of Lübeck Nassir Navab, Technical University of Munich
Selection of our publications:
- Gumprecht, J.D.J.; Maier, T.; Eckl, R.; Stolzenburg, J.; Lueth, T.C.; , "A new ultrasound imaging concept for laparoscopy in urology," Engineering in Medicine and Biology Society (EMBC), 2010 Annual International Conference of the IEEE, vol., no., pp.5991-5994, Aug. 31
Video 2010: Ultrasound integrated into the patient support and robot-assisted sonography
A Navigation System for Liver Surgery (2005-2010)




Project: A navigation system for liver surgery
Scientists involved: Mathias Markert, Nikita Shevchenko, Johannes Schwaiger, Niko Dörfler, Stephan Nowatschin, Stefan Weber, Tim Lueth
Objective: In liver surgery, compact tumors are embedded in the flexible liver tissue. The tumors are resected in open surgery. Liver tissue (parenchyma) grows back. The liver's vascular system, which does not grow back, is located in the immediate vicinity of the tumors. Damage to the vascular trees during surgery can pose a significant risk to patients, which is why tumors should be removed as close as possible to their margins. If tumor tissue remains, there is a considerable risk of tumor recurrence. A risk assessment is therefore necessary, which was first calculated by the Peitgen group in Bremen. The aim now is to implement a navigation system for soft tissue that can be used by the medical team to plan surgery in such a way as to minimize risk.
Results: Between 2005 and 2010, a clinically approved liver navigation system was developed and evaluated in a clinical study at several clinics in Germany.
Other important research teams at that time: Heinz-Otto Peitgen, MEVIS, University of Bremen
Selection of our publications:
- Johannes Schwaiger, Mathias Markert, Nikita Shevchenko, and Tim C. Lueth: "The effects of real-time image navigation in operative liver surgery," International Journal of Computer Assisted Radiology and Surgery, Volume 6, Number 6, 785-796, 2011, DOI: 10.1007/s11548-011-0557-5
- Bernhard Seidl, Nikita Shevchenko, Tim Christian Lueth, "Efficient Semi-Automatic Segmentation of Liver Tumors from CT Scans with Interactive Refinement," Proceedings of the IASTED International Conference "Biomedical Engineering" (Biomed 2011), February 16 - 18, 2011, Innsbruck, Austria, pp. 310 - 315., DOI: 10.2316/P.2011.723-019
- Doerfler, N.; Seidl, B.; Shevchenko, N.; Stenzel, R.; Lueth, T.C.; "Blood vessel detection in navigated ultrasound: An assistance system for liver resections," Complex Medical Engineering (CME), 2011 IEEE/ICME International Conference on, 2011, pp. 445–450, DOI: 10.1109/ICCME.2011.5876781
- Nikita Shevchenko, Mathias Markert and Tim C. Lueth, "A Fast Recognition Algorithm for Liver Tissue Segmentation from CT Scans", Proceedings of the IASTED International Conference "Biomedical Engineering" (Biomed 2011), February 16 - 18, 2011, Innsbruck, Austria, pp. 316 - 320., DOI: 10.2316/P.2011.723-021
- Shevchenko, N.; Schwaiger, J.; Markert, M.; Flatz, W.; Lueth, Tim C.; , "Evaluation of a resectable ultrasound liver phantom for testing of surgical navigation systems," Engineering in Medicine and Biology Society, EMBC, 2011 Annual International Conference of the IEEE, vol., no., pp. 916–919, Aug. 30, 2011–Sept. 3, 2011, doi: 10.1109/IEMBS.2011.6090205
- Markert M, Koschany A, Lueth T.: "Tracking of the liver for navigation in open surgery." Int J Comput Assist Radiol Surg. 2010 May;5(3):229-35. Epub 2009 Aug 7. Review., DOI: 10.1007/s11548-009-0395-x, PMID: 20033499
- Schwaiger, J.; Markert, M.; Seidl, B.; Shevchenko, N.; Doerfler, N.; Lueth, T.C.; , "Risk analysis for intraoperative liver surgery," Engineering in Medicine and Biology Society (EMBC), 2010 Annual International Conference of the IEEE , vol., no., pp.410-413, Aug. 31 2010-Sept. 4 2010, doi: 10.1109/IEMBS.2010.5627313, PMID: 21096534
- Shevchenko, N.; Seidl, B.; Schwaiger, J.; Markert, M.; Lueth, T.C.; , "MiMed liver: A planning system for liver surgery," Engineering in Medicine and Biology Society (EMBC), 2010 Annual International Conference of the IEEE , vol., no., pp.1882-1885, Aug. 31, 2010-Sept. 4, 2010, doi: 10.1109/IEMBS.2010.5627120, PMID: 21096423
- Oldhafer KJ, Stavrou GA, Prause G, Peitgen HO, Lueth TC, Weber S.: "How to operate a liver tumor you cannot see." Langenbecks Arch Surg. 2009 May;394(3):489-94. Epub 2009 Mar 12., doi: 10.1007/s00423-009-0469-9, PMID: 19280221
- G. A. Stavrou, S. Weber, H.-O. Peitgen, T. C. Lueth, and K. J. Oldhafer: "[First Resection of a Non Visible, Non Palpable Liver tumor Using Modern Visualization Techniques and Navigation]" CHIRURGISCHES FORUM UND DGAV FORUM 2009 German Society for Surgery, 2009, Volume 38, VI, 81-83, DOI: 10.1007/978-3-642-00625-8_33
- Markert M.; Koschany A.; Lueth T.C. "Tracking of the liver for navigation in open surgery." CARS: Int'l Congress on Computer Assisted Radiology and Surgery, Berlin, Germany, June 23-27, 2009. In Lemke, et al. (Ed.), International Journal of Computer Assisted Radiology and Surgery 4(Suppl. 1), Springer Verlag, pp. S286-S287.
- Nowatschin, S.; Markert, M.; Weber, S.; Lueth, T.C.; , "A system for analyzing intraoperative B-Mode ultrasound scans of the liver," Engineering in Medicine and Biology Society, 2007. EMBS 2007. 29th Annual International Conference of the IEEE , vol., no., pp.1346-1349, 22-26 Aug. 2007, doi: 10.1109/IEMBS.2007.4352547
- Nowatschin S., W. S., Lueth T.C.. "Automatic landmark extraction in intraoperative ultrasound images of the liver. " CARS 2007 Proceedings of the 21th Congress on Computer Aided Radiology and Surgery, June 27-30, Berlin, Germany
- Markert M., Weber S., Kleemann M., Bruch H.P., Lueth T.C. (2006): "Comparison of fundamental requirements for soft tissue navigation with a novel assistance system for open liver surgery." CARS 2006: Int'l Congress on Computer Assisted Radiology and Surgery, Osaka, Japan, Int J CARS (2006) 1:pp. 498-499.
- Nowatschin S., Weber S., Lueth T.C. (2006): "Comparison of different phantoms for evaluating new assistance systems for open liver surgery." CARS 2006: Int'l Congress on Computer Assisted Radiology and Surgery, Osaka, Japan, Int J CARS (2006) 1:498
- Nowatschin S., Weber S., Lueth T.C. (2006): "Fast and simple segmentation of vessels in the liver using intraoperative ultrasound data." CARS 2006: Int'l Congress on Computer Assisted Radiology and Surgery, Osaka, Japan, Int J CARS (2006) 1:288-290.
- Weber S., Markert M., Nowatschin S., Kleemann M., Bruch H.P., Lueth T. C.: "Computer Assistance for Supporting Complex Liver Resections." World Congress of the International Hepato-Biliary-Pancreato Association (IHBPA), Edinburgh, UK , September 3 - 7, 2006.
Surgical Navigation System for Dental Implants (RoboDent III, 2008)




Project: Surgical navigation system for the insertion of dental implants in maxillofacial surgery (RoboDent III)
Participating scientists: Thomas Maier, Sebastian Stopp, Thomas Wenger, Alexander Rautenberg, Herbert Deppe, Tim Lueth
Objective: Through a new technology with 5mm gas ball trackers, improved and more fragile trackers, new display technology for the second display the attempt to improve dental navigation was started again. The aim of the work was also to provide patients with implants and a matching superstructure within one appointment. For this purpose, the position of the dental implants must be precisely planned, they must be aligned in parallel and the planning must be precisely feasible.
Results: In the period 2008-2011, the system was modified by new smaller trackers, the software significantly improved and new display technologies tested (iPhone 02/2008 wireless). One problem remains the billing model, which did not finance the introduction of complex technology that has to be funded by the physician versus disposables that the physician is allowed to bill for. The RoboDent devices were manufactured by ErgoSrug GmbH based on the new panel-PC Navigation devices with the 5mm glass sphere trackers. Prof. Dr. Dr. Herbert Deppe was main clinical advisor for dental implantology at this time.
Other important research teams: Materialize
Selection of our publications:
- Lueth, Tim C.; Wenger, Thomas; Rautenberg, Alexander; Deppe, Herbert; , "RoboDent and the change of needs in computer aided dental implantology during the past ten years," Robotics and Automation (ICRA), 2011 IEEE International Conference on , vol., no., pp.1-4, 9-13 May 2011
- Stopp, T. Maier and T.C. Lueth (2008): "New methods in computer-aided dental implantology" THE MKG-CHIRURG, Volume 1, Number 1, 10-21
Video 2008: Surgical Navigation System for Dental Implants (RoboDent III NPU)
Dr.-Ing. Franz Irlinger takes over the MIMED Deputy Position and directs Micro Technology (2008)




Tim Lueth is delighted that Franz Irlinger (Academic Director) will become his sole deputy at the chair, perfectly organizing teaching and taking care of the topics of microtechnology, mechanisms, and 3D printing. Until his retirement in 2024, he will also continue to support the German Gear Technology Colloquium (Aachen-Dresden-Munich) and teach Tim Lueth in the field of mechanism theory.
Dr.-Ing. Stefan Weber appointed professor at COME, University of Bern / Inselspital (2008)




MIMED is very proud that Stefan Weber, doctoral student and postdoctoral researcher for many years as head of medical devices at Tim Lueth, has been appointed professor in Lutz Nolte's department at the COME Research Institute of the University of Bern in collaboration with the Inselspital. Tim Lueth is delighted that Stefan Weber has not only founded further medical robotics companies since 2008 (Cascination, LEM), but is also helping to give the 11:Metre One Design "ELFE" a new lease of sporting life on Lake Thun from 2019 onwards.
Tim Lueth finalist of European Inventor of the Year 2007 (Lifetime Achievement)
Tim Lueth, finalist as Inventor of the Year 2007 in the Lifetime Achievement category for his inventions in the field of surgical navigation and robotics. The EPO commissions a video about his current work.

Team Sport - Rowing (2007)




Project: Team Sport - Rowing (2007)
Participating scientists: Markus Vogl, Yuichiro Honda, Michael Scheuenpflug, Mario Strauß, Marcus Fischer, Mathias Markert, Jan Harnisch, Oliver Kessling, Tim Lueth
Objective: Does competitive team sport support scientific output and the professional career of scientists?
Results: Now that the ELFE boat is available to SV03 in Berlin and Tim Lueth is rowing in the TU Munich professors' eight against LMU, the MIMED team will begin training next season 2007.
Hands-Free Sheet Metal Bending with Navigated Bend Control – “NaviBend”

Sheet metal bending, for example for the manufacture of historical armor or complex individual pieces, is done with a machine that can punch or compress sheet metal. Only a very experienced worker can use this machine to produce free forms without rejects and without using a die and a press. With the help of "navigated control," it is possible to compare the deviation of the current sheet metal shape with the target shape and, while the worker moves the sheet metal back and forth under the machine, decide where another blow is necessary to approach the target shape. The project was developed in close cooperation with Professor Wolfram Volk (Chair of Forming Technology), who complemented our navigation expertise with his bending expertise.
Active Eye - Robotized Stereocamera for Navigation (2006-2009)




Project: Robotic workspace extension of a navigation camera with automatic position optimization (2006–2008)
Involved scientists: Max Krinninger, Florian Hurka, Gero Strauß, Tim Lueth
Objective: The use of navigation in certain fields such as dentistry was limited by the size and minimum distance (even with a pyramidal volume) of the Polaris camera, as the stereo camera’s field of view was repeatedly obstructed by staff, operating lights, or insufficient ceiling height. Therefore, between 2002 and 2005, experiments were conducted with other stereo cameras (Bumblebee) and electromagnetic measurement technologies. At the end of 2004, NDI developed the Vicra camera for dental applications, which was later also adopted in ENT surgery. However, repositioning and reorienting the camera after changes in patient position or camera stand remained problematic.
Results: The first prototype by Max Krinninger was built in 2006 using the Automat construction kit with a plaster housing. Later, servo motors and 3D-printed silicone couplings were used. Only through integration with the NC bus (Florian Hurka) could the camera be fully automatically aligned and select its optimal working position autonomously. The device became a commercial product in the KARL STORZ navigation system family by ERGOSURG, nevertheless, after 2010 electromagnetic navigation became more popular.
Other important research teams at that time: COME Bern (Frank Langlotz PhD & Lutz-Peter Nolte)
Selection of our publications:
- Schaller, S., Strauss, G., Krinninger, M., Hurka, F. et al. (2011): Influence of an auto-motorized optical navigation camera on the surgical workflow in ENT surgery. *Laryngo-Rhino-Otologie*, Europe PMC.
- Strauss, G., Krinninger, M., Hurka, F. et al. (2011): The effects of a robot-guided navigation camera in ENT surgery. *Laryngo-Rhino-Otologie*, Thieme Connect.
- Lüth, T. & Strauß, G. (2010): Discussion of different assistance methods for endoscopy from a technical perspective. *Endoskopie heute*, Thieme Connect.
- Hurka, F., Strauss, G., Krinninger, M. & Lueth, T.C. (2011): The effects of a robot-guided navigation camera in ENT surgery. *Laryngo-Rhino-Otologie.*
3D Optical Tracking for Free Hand Spray Painting with Navigated Control - "NaviFitty"


BMW 650 Lab at MIMED's Mechanism Collection




Project: BMW 650 Lab
Scientists involved: Chris Bangle, Franz Irlinger, Kassim Abdul-Sater, Klaus Bengler, Christian Richter, Tim Lueth
Objective: Collaboration with BMW in the field of door and soft top kinematics and the integration of sensor technology for monitoring health parameters is to be ensured by integrating a drivable BMW 650.
Results: Based on a project with Chris Bangle and Klaus Bengler (then still at BMW), a vehicle was integrated into MIMED. The AgeTech group (Lorenzo D'Angelo) integrated sensors into the vehicle and Dr. Irlinger's group optimized door and soft top kinematics.
Startup Company ErgoSurg GmbH (2006)




Project: Startup Company ErgoSurg GmbH (2006)
Founder involved: Tim Lueth
Company background: Twelve months after moving from Berlin to Munich, ERGOSURG GmbH was founded in 2006 because business partner Jürgen Bier (LB Medical / RobDent) fell seriously ill and unusual business activities by company employees in Berlin required immediate action. With the purchase of Juergen Bier's 33% stake in the summer of 2007, Tim Lueth became the sole shareholder. Long-time development and business partner Jürgen Bier passed away in December 2007 after a serious illness. In contrast to the property rights of LB Medical GmbH, the entire company inventory of RoboDent GmbH, including the software servers, unfortunately remains missing. This also affects the navigation software developed by Charité and BZMM on behalf of RoboDent GmbH from 2001 and 2003 onwards: LapDoc - NaviPanel ENT - NaviBase.
Success story: In mid-June 2007, Ergosurg GmbH is audited by TÜV Rheinland as an MPG manufacturer and, in the fourth quarter, begins production as an OEM manufacturer of CE-certified optical and electromagnetic ENT navigation systems for Karl Storz Tuttlingen in the start-up center of the Technical University of Munich. The first 10 devices are delivered in 2007. A total of 1,000 surgical navigation systems are distributed worldwide over the next years. RoboDent GmbH also has its devices manufactured by Ergosurg. In 2013, a collaboration begins with MAKO, and in 2017 with Joimax, which wins the NASS Technology Award in 2019 with the spinal navigation system developed by ERGOSURG. At the end of 2024, an international company becomes the majority shareholder of ErgoSurg GmbH.
Certification of MIMED as medical device manufacturer - ISO 13485 ISO 9001 (2006)




Project: Certification of the MIMED Chair/Professor Lueth as a medical device manufacturer according to ISO13485 & ISO9001
MIMED group leaders involved: Stefan Weber, Franz Irlinger, Franz Niederhofer, Ralf TIta, Tim Lueth
Objective: The objective was to have the new MIMED Chair officially certified as a medical device manufacturer as quickly as possible after Tim Lueth moved from Charité Berlin to the Technical University of Munich.
Results: After one year, following an audit in June 2006, not only the MIMED chair but also the start-up ERGOSURG GmbH were certified by TÜV Rheinland according to ISO 13485 and ISO 9001. The auditors from TÜV had already certified the former chair and the BZMM under the direction of Tim Lueth in Berlin.
Tim Lueth moves to the Technical University of Munich, leaving BZMM (2005)




Tim Lueth moves to the Technical University of Munich (MIMED) in the 2005/06 winter semester.
Background: After Tim Lueth did not consider moving to Munich in 2001, he will be appointed to the Technical University of Munich in 2005.
Independent Research: Tim Lueth was appointed professor for life at the Technical University of Munich on July 1, 2005, and began his work on October 1, 2005, for the 2005/2006 winter semester. His chair is called MIMED (Microtechnology and Medical Device Technology). The inaugural lecture will take place on April 5, 2006. The teaching load will increase from 2 SWS to 9 SWS. Tim Lueth is leaving the Fraunhofer Society to reduce potential conflicts between the university/FhG and company start-up activities.
Panel-PC based navigation systems for ENT surgery (2003-2006)




Project: Panel-PC based navigation systems for ENT surgery
Participating scientists: Stefan Weber, Mario Strauß, Gero Strauß, Friedrich Bootz, Tim Lueth
Objective: In the period 2003-2005, the ENT medical science developed the wish not to simply use the existing neuro-navigation system as a discipline with a large number of cases, but to implement a special system for ENT surgery.
Results: In close cooperation with the ENT Clinic Leipzig, a first ENT navigation system based on the MKG hardware was developed in 2002-2005. With the advent of powerful panel PC solutions in 2005, it became possible to plan and graphically display the navigation on a panel PC. We were able to show that a surgical navigation system can be very small and portable and can be operated almost completely without touching the screen.
Other important research teams: Maurice Ferré et al., VT, later GE, later Z-cat. later Mako, later Stryker-Mako
Selection of our publications:
- Stefan Weber, Mario Strauss, Tim C. Lueth: "A new small, light and mobile navigation system for application within the sterile situs", CARS 2005 International Congress Series, Volume 1281, May 2005, Page 1353
- Strauss, M.; Stop, S.; Koulechov, K.; Lueth, T. (2006): A novel miniaturized navigation system for ent surgery and its first clinical application. CARS 2006: Int'l Congress on Computer Assisted Radiology and Surgery, Osaka, Japan, Int J CARS (2006) 1:503. (1st Price ISCAS Poster Award 2006)
- Strauss G, Koulechov K, Röttger S, Bahner J, Trantakis C, Hofer M, Korb W, Burgert O, Meixensberger J, Manzey D, Dietz A, Lueth T.: "Evaluation of a navigation system for ENT with surgical efficiency criteria." Laryngoscope. 2006 Apr;116(4):564-72
The system is certified and in regular clinical use worldwide. Other students (Timo Krüger 09/2002, Dirk Mucha 04/2003, Kosmecki 03/2004 et al.) of Tim Lueth started later the companies FIAGON (2007) and SCOPIS (2010) using the technology and source code developed in Tim Lueth's Labs at Charité and Fraunhofer-IPK and Tim Lueth's company RoboDent since 2001.
Navigated Control in Cranio Maxillofacial Surgery
Attention: The video is a real surgical video and shows bone structures and blood.
Video 2005: Removing a bone tumor by an automatic power switching drill/burr (0.20 Min)

Automatic Detection of Human Hand Gestures and Controlling the DLR Hand
This was the Ph.D. research of Dr.-Ing. Yuichiro Honda, today working at the Kobe Rehabilitation Laboratory, Hyogo, Japan.
Video 2007: Controlling the movements of the DLR hand by skin deformation measurement (0:11 Minutes)
")
")
Development of an electromagnetic navigation system (2004-2005)




Project: Development of an electromagnetic navigation system (2004-2005)
Scientists involved: Dirk Mucha, Bartosz Kosmecki, Tim Lueth
Objective: After NDI (Stephan Kirsch) launched a new electromagnetic measurement method (AURORA) alongside the stereo-optical navigation camera (POLARIS), it was necessary to evaluate whether it could also be used in close proximity to motorized instruments, such as in dental implantology, where the line-of-sight problem is particularly relevant, as the Polaris VICRA with a close working range was not yet on the market.
Results: In February 2005, the Aurora-Dent Clinical Study system was completed with software development financed by RoboDent, enabling navigation of the drill handpiece. Dirk Mucha founded the company SP Solution Pool (Fiagon) in 2007 and Bartosz Kosmecki founded the company Scopis in 2010.
Selection of our publications:
- Mucha, D., Kosmecki, B., & Lueth, T. (2005). Error compensation for electromagnetic navigation in dental implantology. International Congress Series, Elsevier.
- Mucha, D., Kosmecki, B., & Lueth, T. (2004). Applying electromagnetic position sensing for navigation in dental implantology – A first analysis. *2nd International Symposium CAS-H, Bern*.
- Mucha, D., Kosmecki, B., & Lueth, T. (2005): Accuracy of drilling cavities for dental implants with electromagnetic navigation support. *3rd International Conference on Computer Aided Surgery*.
Certification of BZMM as a medical device manufacturer – ISO 13485 ISO 9001 (2004)



Project: Certification of BZMM as a medical device manufacturer – ISO 13485 ISO 9001 (2004)
Scientists involved: Stefan Weber, Peter Tetenz (TÜV Rheinland), Tim Lüth
QM Beauftragte: Stefan Weber, Dirk Mucha, Dirk Schauer
Objective: Now that the Otto robot (delta kinematics) has been approved as a medical device by SRL Charité as a single unit, the BZMM (IPK MedTech and Charité SRL) should be able to be officially listed as a certified medical device manufacturer with DIMDI. In addition to documented proof that we have been working in accordance with ISO 13485 for a year, we need QM documentation and an internal and external TÜV audit in order to be recognized as an MPG manufacturer.
Results: While Tim Lüth programs the networked Filemaker database for the approval documents, Stefan Weber takes care of documenting the work instructions and the overall design of the QM manual. We will receive the certificates in June 2004!
Bone Segment Navigation and Laser Surface Scan based Navigation (2003)


Project: Bone Segment Navigation
Scientists involved: Rüdiger Marmulla, Georg Eggers, Stefan Haßfeld, Tim Lüth
Objective: This project on bone segment navigation was largely driven forward by Priv.-Doz. Dr. Dr. Rüdiger Marmulla! Rüdiger Marmulla, MD, DMD, and a talented software programmer, wanted to demonstrate that in maxillofacial surgery, osteotomies can be performed with significantly greater accuracy using navigation systems rather than simple metal rulers. To this end, he programmed his own navigation system, SNN, in Regensburg with the support of Carl Zeiss (IGT camera) and navigated bone segments with trackers attached to them. This work was continued at the Mühling/Haßfeld Clinic for Maxillofacial Surgery at Heidelberg University Hospital. Tim Lüth contributed the Minolta 3D scanner to check the surgical results and pursued the project in parallel with the work in maxillofacial surgery at Charité.
Results: In Tim Lueth's view, an important research result was to show that deviations in the surgical outcome from the surgical plan were not primarily due to the accuracy of the coordinate measurement method, but primarily to the manual screwing of the miniplates. A series of publications were produced until Prof. Dr. Marmulla ended his work at the University Hospital.
Selection of our publications:
- Marmulla, R., Hassfeld, S., Lüth, T., & Mühling, J. (2003): Laser-scan-based navigation in cranio-maxillofacial surgery. Journal of Cranio-Maxillofacial Surgery, Elsevier.
- Marmulla, R., Lüth, T., Mühling, J., & Hassfeld, S. (2004): Markerless laser registration in image-guided oral and maxillofacial surgery. *Journal of Oral and Maxillofacial Surgery*, Elsevier.
- Marmulla, R., Lüth, T., Mühling, J., & Hassfeld, S. (2004). Automated laser registration in image-guided surgery: evaluation of the correlation between laser scan resolution and navigation accuracy. *International Journal of Oral and Maxillofacial Surgery*, Elsevier.
- Marmulla, R., Mühling, J., Lüth, T., & Hassfeld, S. (2006). Physiological shift of facial skin and its influence on the change in precision of computer-assisted surgery. *British Journal of Oral and Maxillofacial Surgery*, Elsevier.
- Marmulla, R., Mühling, J., Lüth, T., & Eggers, G. (2004): Advanced surface-recording techniques for computer-assisted oral and maxillofacial surgery. *British Journal of Oral and Maxillofacial Surgery*, Elsevier.
- Marmulla, R., Hassfeld, S., Lüth, T., & Mende, U. (2003): Soft tissue scanning for patient registration in image-guided surgery. *Computer Aided Surgery*, Taylor & Francis.
- Marmulla, R., Hassfeld, S., Lüth, T., & Mühling, J. (2003): Next generation’s navigation systems. *International Congress Series*, Elsevier.
- Marmulla, R., Mühling, J., Lüth, T., & Eggers, G. (2004): Image-to-patient registration by the natural anatomical surfaces of the auricle, mandible, and maxilla. *International Congress Series*, Elsevier.
- Marmulla, R., Mühling, J., Lüth, T., & Eggers, G. (2003): New concepts in image-assisted surgery: automated patient registration based on the jaw and external ear. *Oral and Maxillofacial Surgery*, Springer.
- Ruediger Marmulla and Tim Lueth (2000): "Method and device for instrument, bone segment, tissue and organ navigation," granted US patent US-7079885-B2 (2006-07-18)
Dr.-Ing. Andreas Hein appointed professor at University of Oldenburg (2003)




Tim Lueth is delighted that his long-standing deputy and head of the Medical Devices Department at Fraunhofer IPK Berlin, Andreas Hein, has accepted the professorship for “Automation and Measurement Technology” at the University of Oldenburg. Congratulations from all colleagues at BZMM (Charité and IPK). With SRL since July 1997, doctorate in February 2000, head of department at IPK (2001) and professor beginning of 2003 – an impressive career.
A method for navigated imaging with X-ray projection images (Navi-X, 2002)



Project: A method for navigated imaging with X-ray projection images (Navi-X)
Participating scientists: Daniel Szymanski, Dirk Schauer, Andreas Hein, Tim Lueth
Objective: The aim of the project is to reduce the X-ray dose in the planning of dental procedures by means of registered imaging with navigated 2D CCD image converters.
The planning of interventions in dental implantology for the use of drilling templates or surgical navigation systems is based on preoperative volumetric imaging in CT/DVT. These imaging devices are usually not to be found in practice, require high investments, trained personnel and generate X-ray radiation which affects PAtient and, if necessary, personnel. It should be investigated whether the use of normal small X-ray apparatus with CCD detector is sufficient for volumetric imaging with high resolution but low local radiation exposure and image volume.
Results: We have implemented a system in which the pose (position and orientation) of the X-ray source and the pose of the high-resolution image converter (CCDsensor) are tracked and the relative orientation is represented by a small screen on the tube. The patient's pose is also measured in order to register different images locally in the patient and to enable surgical navigation without additional (i.e. automatic) registration. The triggering of the X-ray source is only possible if a) the CCD sensor is located in the beam path. b) the alignment of the CCD sensor provides an essential projection surface and c) the image provides essential additional information, for example from a different angle. We were able to show that such a system is functional for high-resolution (CT/DVT) imaging of individual implants at the beginning of 2002.
Other important research teams: none known
Selection of our publications:
- Daniel Szymanski, Dirk Schauer, Tobias Jahnz, Tim Lueth: "A tube adapter for the navigation of a dental X-ray machine". Image Processing for Medicine 2004: 254-258
- D. Szymanski, T. C. Lueth, "An automatic intervention documentation system for dental navigation systems," International Congress Series, Volume 1268, CARS 2004 - Computer Assisted Radiology and Surgery. Proceedings of the 18th International Congress and Exhibition, June 2004, Page 1387
- D Szymanski, A Hein, T.C Lueth, "Navi-X--a planning and treatment system for dental implantology based on navigated projection images," International Congress Series, Volume 1256, CARS 2003. Computer Assisted Radiology and Surgery. Proceedings of the 17th International Congress and Exhibition, June 2003, Pages 1243-1249
EFRE Project BZMM (Berlin Center for Mechatronic Medical Devices, 2002)




Project: EFRE Project BZMM (Berlin Center for Mechatronic Medical Devices) 2002
Directors: Tim Lueth (Managing Director), Juergen Bier, Eckart Uhlmann
Objective: With the approval end of 2002 of the EU infrastructure (EFRE) application BZMM (Berlin Center for Mechatronic Medical Devices) in June 2000, the joint Berlin center between Fraunhofer IPK and Charité, under the management of Prof. Dr. Tim Lüth, can officially begin in December 2002. At this point, Tim Lüth was already a Fraunhofer professor at Charité according to the Berlin model with a reduced teaching load of 2SWS. The goal is to establish IPK Berlin within the Fraunhofer Society as a leading location for medical robots and computer-assisted surgery and to enable further company start-ups in Berlin Brandenburg after JJM GmbH, FIMR gGmbH, LB Medical GmbH, and RoboDent GmbH.
Results: With the opening, funds were available to hire additional staff at Charité and the Fraunhofer Institute (Timo Krüger, Dirk Mucha, Emanuel Jank, Andreas Rose) and to expand previous developments in navigation towards electromagnetic (Aurora), new redundant robot arm kinematics (Mitsubishi PA10), or X-Ray systems. The state of Berlin provided €1.2 million in funding from the EFFE fund. The Fraunhofer Society provided a similar amount and financed the C4 professorship of Tim Lüth, who, in parallel to his work at Charité, also held the position of division director at IPK for medical technology. Tim Lüth had already set up the first laboratory for the BZMM at the IPK Berlin during his time as acting division director from 2001 onwards, for example to work on the C-arm project for the company ZIEHM. RoboDent also funded the BZMM with €800,000 as part of a BMBF application to have the source code handed over to the BZMM revised. For this reason, the RoboDent source code was available at the IPK and Charité. With Tim Lueth's move to the Technical University of Munich at the end of 2005, Klaus Radermacher (academic advisor at RWTH Aachen University) and then Erwin Keeve (Bonn, Oslo) was appointed as the new director, a position he held until 2017.
Patent Situation: From 2003 onwards, professors were no longer able to register their inventions for patents at their own expense and in their own name, but had to register the patents via the universities/Fraunhofer. It is astonishing that all of Tim Lüth's patents, which he registered himself and was represented by the law firm Gulde Hengelhaupt, were granted, while none of the patents (DE-102004009367-A1, DE-102004011888-A1, DE-102004011959-A1) that he had to register as co-inventor via the Fraunhofer patent department were granted. For this reason, Tim Lueth already classified the change in employee invention law as inadequate at the end of 2005. While a company needs patents to protect its production and wants to retain inventors through profit sharing, public-law corporations have no intention of making a profit and there are numerous conflicts of interest between profit sharing for inventors and the acceptance of third-party funds from potential patent litigants or licensees.
Other important research teams at that time: Munich, MITI (Hubertus Feussner, TUM-MRI), Strasbourg IRCAD (Jacques Marescaux), Karlsruhe-Heidelberg (SFB 414 Computerassisted Surgery)
Robotized Isocentric C-Arm as Cone-Beam CT "Robo-C" (2001-2004)




Robot-based isocentric C-arm for volumetric imaging
Participating scientists: Ralf Tita, Andreas Hein, Tim Lueth
Objective: The aim of the project was to convert a standard C-arm for intraoperative 2D projection images into an intraoperative Conebeam computer tomograph. Several intermediate goals have to be achieved. Measurement of the position of X-ray source and image converter at each image acquisition. Motorization of two axes to always move the X-ray beam through an isocenter during rotation. It must be possible to move the X-ray source and the image converter along the X-ray axis if collisions occur. Since the radon transformation is based on equidistant angular changes, algebraic reconstruction (ART/SART) must be used. However, the calculation takes about 40 minutes on a PC and the calculation time must be pressed for less than 1 minute. The measuring device must be calibratable in order to be used permanently in clinical operation. Similar to intraoperative CT, automatic patient registration can be achieved in combination with surgical navigation.
Results: Robo-C is the world's first volumetric C-arm with a dynamic isocenter. It was first presented as a product by Instrumentation Ziehm, Nürberg, 2003 at the ERC. We were able to show that the algorithms can be calculated on a GPU and that the calculation time can be reduced to less than one minute. Often only a few images are needed to calculate a volumetric image. The resulting artefacts can be reduced by the surgeon through additional images. In this project, the axis of rotation was not motorized, but the physician rotates the C-arm manually. Images are triggered automatically. The calibration required a very large tracker at the X-ray source and image converter to evaluate the deformation of the C-arm due to the weight of the Qulle or the image converter and to calculate the projects. The algebraic reconstruction uses the X-ray attenuation forms I=I0*exp(sum(di*mi) along a beam axis, where the stands for discrete voxel distances and mi for the X-ray absorption coefficients in the voxel. The logarithmization of the equation leads to a very large linear system of equations
Other important research teams: Willi Alfred Calendar, University of Erlangen
Selection of our publications:
- Tita R., Lueth T.C. (2004): An interactive controllable isocentric C-arm for intraoperative 3D imaging . Robotics, Munich,Germany, June 17-18, 2004
- Ralf Tita; Wolfgang Holler; Sven Huth; T. C. Lueth; Near Real Time Tomographic 3D Reconstruction with the use of the PC GraphicsAccelerator", Multisensor Fusion and Integration for Intelligent Systems, 2006 IEEE International Conference on, pp 279 - 284.
- Tita, R.; Lueth, T.C.; , "Free isocentric 3d imaging and a novel approach for wobble trajectories using a modified standard c-arm,"Engineering in Medicine and Biology Society, 2007. EMBS 2007. 29th Annual Conference of the IEEE , vol., no., pp.4418-4421
The system is certified as Ziehm Vario 3D and in regular clinical use worldwide.
Video 2003: Worldwide 1st cone-beam CT using a 135 deg c-arm with a dynamic isocenter (2:40 Minutes)
Team Sport Sailing (2002) - International German Championship - 11:Metre




Project: Team Sport Sailing (2002) - International German Championship - 11:Metre
Scientists involved: Dirk Broneske, Rüdiger Broneske, Stefan Weber, Tim Lueth
Objective: Does competitive team sport support scientific output and the professional career of scientists?
Results: In 2002, LB Medical wanted the competition team to include not only technical experts but also clinical experts, so we trained and competed in the 2002 IDM as a mixed team of maxillofacial surgeons and engineers/computer scientists.
A navigated mobile image viewer for surgical navigation and augmented reality (2002)




Project: NaviView – A navigated mobile image viewer for surgical navigation and augmented reality
Participating scientists: Stefan Weber, Andreas Hein, Tim Lueth
Objective: The aim of the work was to create a screen that enables the viewing of medical image data and whose image display of previously recorded patient image data (e.g., CT) depends on its absolute position in space (virtual reality) or its position relative to the patient. Moving the monitor gives the impression of being able to look inside the patient. A simple user interface/slider allows either zooming or depth shifting of the image data. The patient image data is calculated as layer images or surface images. A camera attached to the rear allows real-time image information from a camera to be recorded together with its position relative to the patient and simultaneously superimposed on the screen (augmented reality). The physician now has the impression that they can see through the screen onto the patient and at the same time assign the planning data for the operation and the patient image data to the exact location. The parallax problem is greatly reduced by the frame of the screen. The information on the screen is always correct, regardless of the physician's viewing angle. The user automatically centers their gaze perpendicular to the screen.
Results: We were able to implement such a system for the first time in May 2002, which could be used in clinical operations at the Charité hospital starting in 2003. A later version already had the stereo measurement technology integrated into the back of the device.
Other important research teams at that time: None known to us at this time.
Selection of our publications:
Weber S, Hein A, Lueth TC.: "A mobile and navigated image viewer for surgery--evaluation of precision." Stud Health Technol Inform. 2003;94:395-400. 94:395-400.
Weber, S. Klein, M. Hein, A. Krueger, T. Lueth, T. C. Bier, J.: "The Navigated Image Viewer - Evaluation in Maxillofacial Surgery," Lecture Notes in Computer Science, 2003, Volume 2878, Medical Image Computing and Computer-Assisted Intervention - MICCAI 2003, pages 762-769.
Weber, S.; Klein, M.; Hein, A.; Krueger, T.; Lueth, T.C.; Bier, J.; , "Application of different visualization concepts in the navigated image viewer," Intelligent Robots and Systems, 2003. (IROS 2003). Proceedings. 2003 IEEE/RSJ International Conference on , vol.1, no., pp. 779- 784 vol.1, Oct. 27-31, 2003.
Weber S., Hein A., Lueth T. (2002): "Evaluation of accuracy in navigated display of medical image data." CURAC Annual Conference 2002, Leipzig, October 4-5, 2002.
Surgical Navigation System for Dental Implantology "RoboDent"

RoboDent started as research project of Olaf Schermeier. At this time the Israeli company DenX offered a dental training system and Michael Truppe's company ARTMA was also developing a navigation system for maxillofacial surgery. Nevertheless, RoboDent was the highlight of the IDS 2001 in Cologne. Main Clinical Advisor was Dr. Detlef Hildebrand.
Video 2001: RoboDent worldwide 1st commercial successful dental navigation system (4:30 Minutes)
Hands-On Robotics with 7DoF Manipulator (Otto-II) and Navigated Control (2001)




Project: Hands-On Robotics with 7DoF Manipulator and Navigated Control® in Spinal Surgery (2001)
Involved Scientists: Andreas Hein, Marc Kneissler, Martin Mätzig, Christian Woiciechowsky, Ulrich-Wilhelm Thomale, Tim Lueth
Objective: After the hands-on robot OTTO v. Decke, a delta kinematic system, had been developed and clinically tested from 1997 to 2000, we were able in 2001 to transfer the method to a redundant 7DoF manipulator (Mitsubishi PA10). As an application, neurosurgeons Christian Woiciechowsky and Ulrich-Wilhelm Thomale proposed the placement of pedicle screws in the spine. We had experience with OTTO-I. The new system was named OTTO-II.
Results: A fixation mechanism for the vertebral bodies, visible in intraoperative CT, was jointly developed. Automatic CT registration had been available since 1998. The automatic registration method had already been patented in dentistry (RoboDent). Andreas Hein, who had been responsible for the control of OTTO-I, demonstrated the hands-on control of the redundant robot in December 2001 as a 6D spatial milling template and in combination with the Navigated Control method (automatic tool shutdown at workspace boundaries). We were able to show that the Navigated Control method provides a safety advantage, while the hands-on approach used in OTTO increases user comfort as a three- or six-dimensional virtual template. Since the robot is significantly more expensive than the navigation camera, which is required anyway, it must be carefully considered when a robot is truly necessary and when Navigated Control alone is sufficient.
Other important research teams at that time: Brian Davies, Imperial College London. 2003, Moshe Shoham, Technion, In 2005, the hands-on method was commercialized in orthopedics by the US companies Z-Kat and MAKO Surgical (Maurice Ferré). In 2013, MAKO began a collaboration with Tim Lueth.
Selected Publications:
- Hein, A.; Lueth, T.C.; "Control algorithms for interactive shaping [surgical robots]," Robotics and Automation, 2001. Proceedings 2001 ICRA. IEEE International Conference on, vol.2, pp. 2025–2030, 2001
- Woiciechowsky C., Hein A., Thomale U., Kneissler M., Lueth T.: Introduction of a medical robotic system into spine surgery. 12th World Congress of Neurosurgery, Sydney, Australia, Sept. 16–20, 2001
- Thomale U.-W., Woiciechowsky C., Hein A., Kneissler M., Lueth T.: Introduction of a novel fixation device for robotic-assisted spinal surgery. 6th International Workshop on Computer Assisted Surgery and Rapid Prototyping in Medicine (CAS 2001), Nuremberg, Germany, Oct. 11–13, 2001
Tim Lueth appointed full professor for life at Charité (2001)
After five years at Charité as associate professor (C3), Tim Lueth was appointed full professor (C4) for life at Charité. The Clinic for Maxillofacial Surgery was officially renamed the Clinic for Maxillofacial Surgery – Clinical Navigation and Robotics, headed by Professors Juergen Bier and Tim Lueth.
Team Sport Sailing (2001) - European Championship 11:Metre




Project: Team Sport Sailing (2001) - European Championship 11:Metre
Scientists involved: Dirk Broneske, Rüdiger Broneske, Stefan Weber, Olaf Schermeier, Ralf Tita, Dirk Schauer, Sabine Woytowitz, Tim Lueth
Objective: Does competitive team sport support scientific output and the professional career of scientists?
Results: In 2001, the ELFE (11:Metre one design) was purchased as a team boat while the EOS was being restored. The Broneske brothers (Dirk is doing his doctorate in the team, Rüdiger trains us) are successful sailors. The SRL/RoboDent team trains hard together and travels to Travemünde for the 2001 European Championship in September. The regattas are always up and down. Downwind with a spinnaker, speeds of 16 knots are possible.
Foundation of German Society for Computer- and Robot-Assisted Surgery (2001)


Project: Foundation of CURAC (German Society for Computer- and Robot-Assisted Surgery)
Objective: On March 9, 2001, the German Society for Computer- and Robot-Assisted Surgery (CURAC) will be founded in Leipzig at the Hotel Fürstenhof, based on the International Society for Computer Aided Surgery (ISCAS).
The founding board members are: President Prof. F. Bootz, ENT, Leipzig; 1st Vice President Prof. R. Fahlbusch, NCh, Erlangen; 2nd Vice President Prof. Hirzinger, Robotics, Munich; Secretary General Prof. Dr. H. U. Lemke, Computer Science, Berlin; Treasurer Prof. Schlag, Surgery, Berlin; Deputy Treasurer Prof. Dr. V. Seifert, NCh, Frankfurt, Secretary Prof. Lüth, Robotics, Berlin, Deputy Secretary PD Hassfeld, MKG, Heidelberg
Founding members: from ISCAS are Prof. H.U. Lemke, Computer Science, Berlin Prof. Dr.-Ing. G. Hirzinger, Robotics, DLR Prof. Dr. P.M. Schlag, Surgery, Berlin, Prof. Dr. F. Bootz, ENT, Leipzig, Prof. Dr. W. A. Kalender, Physics, Erlangen Prof. Dr. A. Schweikard, Computer Science, Munich, Prof. Dr. Dr. J. Bier, MKG, Berlin, Dr. U. G. Kühnapfel, Computer Science, Karlsruhe Prof. Dr. V. Seifert, Neurosurgery, Frankfurt, Prof. R. Fahlbusch, Neurosurgery, Erlangen Prof. Dr. T. C. Lueth, Robotics, Berlin, Prof. Dr. R. Wetzel, Orthopedics, Munich, PD Dr. Dr. S. Hassfeld, MKG, Heidelberg, Prof. Dr. F. W. Mohr, Cardiac Surgery, Leipzig, PD Dr. Volkmar Falk, Dr. Gero Strauß, among others (see list)
Startup Company RoboDent GmbH (2001)




Project: Founding of RoboDent GmbH
Founder involved: Tim Lüth and Jürgen Bier
Background: Triggered by the Alfried Krupp Prize for young university teachers, the visibility of medical robotics research in Berlin was once again significantly increased. Following the medical approval of the robot for surgical use on the head and the first operations, interest in navigation and robotics also grew among implant manufacturers and OPG manufacturers. At the same time, the industry lacked the know-how to convert this technology into a product itself in the short term. Since the university cannot take on series production or product liability, the only option was to spin off the company.
The company: At the end of 2000, Jürgen Bier (1/3) and Tim Lüth (2/3) founded LB Medical GmbH and, for the collaboration with Thomas Straumann AG (CH), RoboDent GmbH in Berlin. Their task was to further develop head navigation outside the university, obtain MDD approval, and start series production of navigation systems for maxillofacial surgery and dental implantology. At the company headquarters on Schwedenstraße, as well as at Jojumarie GmbH, a loft was converted into office space, a production facility, and a workshop. The first devices were still equipped with "Ropal" stereo cameras from Rhowedder Visotech (Manfred Schmied, Christian Lappe). However, this company was acquired by the Canadian company NDI in early 2000 and renamed NDI Europe. From mid-2000, NDI Polaris devices were then installed. From 2004, the NDI Vicra was designed in collaboration with RoboDent and installed from 2005. Key employees: Olaf Schermeier (later CTO at Dräger and Fresenius Medical Care), Sabine Woytowicz (later customer director at Valeo)
Competitors: Joshua Lustman, Hebrew University, DenX (Ori Hadomi), Israel, W.F.Thumfart, Innsbruck, Michael Truppe, Wien, Austria, and Company Materialise
Tissue engineering of heart valves (2000)

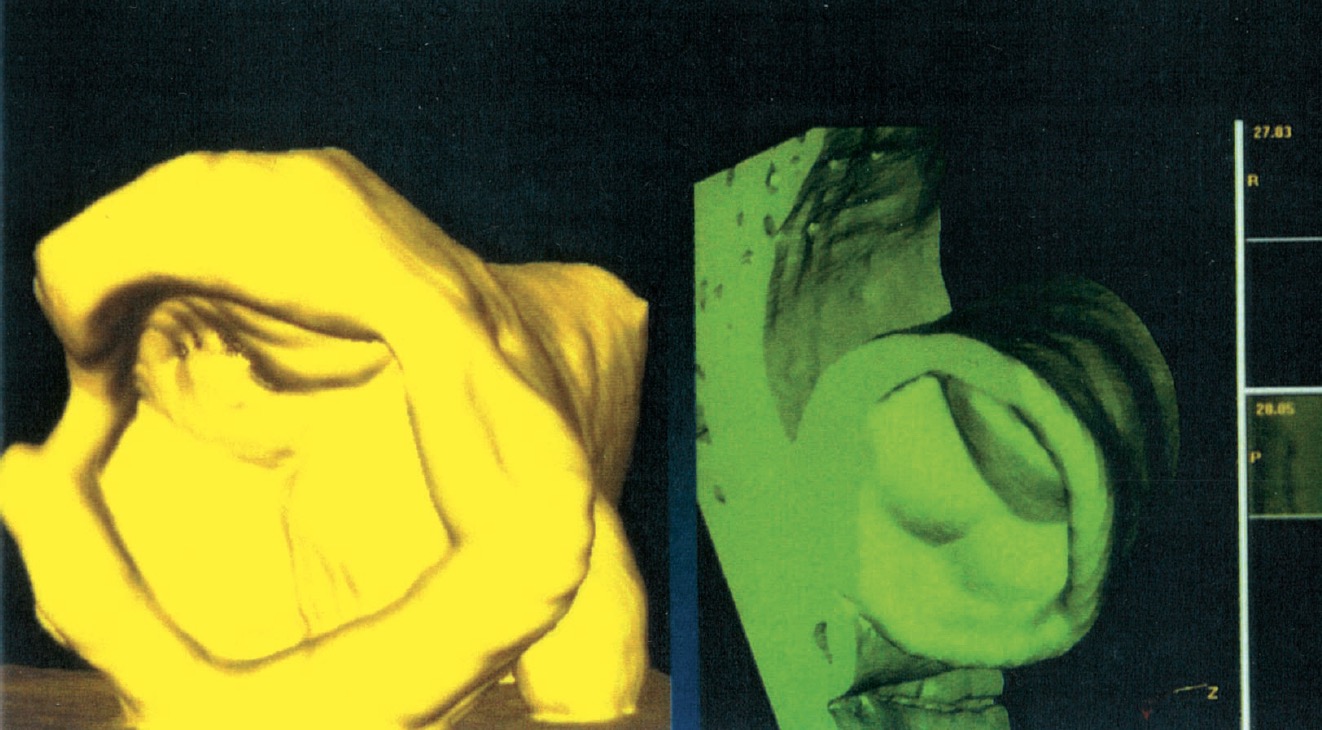


Project: Tissue engineering of heart valves
Scientists involved: Ralf Sodian, Andreas Hein, Daniel Szymanski, Roland Hetzer, Tim Lueth
Objective: The aim of the project was to produce tissue-engineered heart valve replicas based on the geometry of individual heart valves and to implant these instead of using standardized heart valves.
Results: We were able to show that it is possible to segment the vascular geometry based on CT image data, print it in 3D, and use the 3D prints to produce scaffolds for cell colonization on the scaffolds. The cells were grown on the scaffolds in a bioreactor. The grown valves were implanted in sheep.
Other important research teams at that time: Joseph Philip Vacanti, Harvard Medical School Robert Langer, MIT, Cambridge
Selection of our publications:
- Szymanski, D.; A. Hein, R. Sodian, P. Fu, R. Hetzer, T. Lüth: "3D reconstruction of cardiovascular structures for rapid prototyping and tissue engineering." Automed 2001, Bochum, Germany, Sep. 17-18, 2001
- Sodian R, Loebe M, Hein A, Martin DP, Hoerstrup SP, Potapov EV, Hausmann H, Lueth T, Hetzer R.: "Application of stereolithography for scaffold fabrication for tissue engineered heart valves." ASAIO J. 2002 Jan-Feb;48(1):12-16.
- Sodian R, Fu P, Lueders C, Szymanski D, Fritsche C, Gutberlet M, Hoerstrup SP, Hausmann H, Lueth T, Hetzer R.: "Tissue engineering of vascular conduits: fabrication of custom-made scaffolds using rapid prototyping techniques." Thorac Cardiovasc Surg. 2005 Jun;53(3):144-149.
Robot-assisted seed implantation for brachytherapy of the prostate (TectoDart 2000)




Project: 3D ultrasound imaging and robot-assisted seed implantation for brachytherapy of the prostate
Participating scientists: Stefan Weber, Rolf Lechtenberg, Christoph Tiede, Andreas Eckert, Tim Lueth
Objective: The objective was to develop an integrated 3D ultrasound and seed implantation assistance system for brachytherapy of the prostate.
Results: An ultrasound probe is moved in the rectum via a linear drive that can be actively controlled or passively moved by the physician. A patented tissue protection device with integrated ultrasound-visible markers allows non-invasive tomographic imaging of the tissue around the prostate as well as tracking and position measurement of the needle tip of manually or assisted-inserted needles. An ejection mechanism can be activated when the needle is withdrawn to eject a seed where the current position of the needle tip and continuous radiation planning indicate the optimal position for the radiation source. The method is patented and was used in a similar way for Navifitty or freehand 3D printing in 2006.
Other important research teams at that time: no group known to us at that time
Selection of our publications:
- Tim Lueth (2000): Method and applicator for positioning and/or ejecting radiation sources via hollow needles into biological tissue, Granted German Patent DE-10058163-C2, Bebig Isotopen- und Medizintechnik GmbH, later Eckart und Ziegler AG
- Tim Lueth (2000): Device for the linear and/or rotary guidance of an object such as a probe and instrument guidance, Granted German Patent DE-10051953-C1, Bebig Isotopen- und Medizintechnik GmbH, later Eckart und Ziegler AG
Table-integrated robot for mammabiopsy in nuclear spin tomography MRI (1999)



Project: Table-integrated robot for mammabiopsy in nuclear spin tomography (MRI)
Participating scientists: Oliver Wendt, Yuichiro Honda, Tim Lueth, Johann Oellinger, Carsten Siewert, Roland Felix
Objective: The aim was to develop a robot that can be operated without image artifacts in a magnetic resonance tomograph and can perform a precise breast biopsy.
Results: In the period 1997-2000 such an MRT table and coil-integrated robot was developed. At the time of completion, however, the focus for mammary biopsies was again on CT and ultrasound. A patent dispute with Siemens stopped the conversion into the final medical product. The pictures show the trade fair appearance at MEDICA 2000.
Other important research teams: Siemens Medical
Selection of our publications:
- M Hentschel, J. Oellinger, C. Siewert, H. Wieder, N. Hosten, O. Wendt, T. Lueth, U. Boenick and R. Felix: "H and P-NMR Characterisation of a Double Breast Coil for Spectroscopic Measurements and Imaging - Characteristics of a Newly Developed Mammado Double Coil for NMR Spectroscopy 1H31P) and Imaging", Biomedical Engineering 1999 44:10 , 272-277 , DOI: 10.1515/bmte.1999.44.10.272, PMID: 10584401
- Oellinger H, Wendt O, Siewert C, Park IC, Dorsch M, Lueth TC, Felix R, Boenick U.: "Effects of para- and diamagnetic materials in a 1.5 Tesla high field magnetic resonance tomography system (MRT)," Biomed Tech (Berl). 1998 Oct;43(10):281-6, DOI: 10.1515/bmte.1998.43.10.281
- O Wendt, J. Oellinger, T C Lueth, R. Felix and U. Boenick: "The Effects of the Use of Piezoelectric Motors in a 1.5-Tesla High-Field Magnetic Resonance Imaging System (MRI) - Effects of Piezoelectric Motors in a 1.5-Tesla High-Field Magnetic Resonance Imaging (MRT)", Biomedical Engineering/Biomedical Engineering 2000 45:1-2 , 20-25 , DOI: 10.1515/bmte.2000.45.1-2.20
- O. Wendt, J. Oellinger, U. Boenick, R. Felix, T.C. Lueth, D. Schauer: "Biopsy device for histological preservation of small tumors in MR mammography," Biomedical Engineering Jan 2000, Volume 45, No. s1, Pages 220-221, DOI: 10.1515/bmte.2000.45.s1.220
- Johann Oellinger, Oliver Wendt, Carsten Siewert, Tim Lueth (2000): "Automatically controlled breast biopsy." Humboldt Spectrum, 3/2000, p.48-51.
- Oliver Wendt, Johann Oellinger, Tim Lueth (1999): "Positioning unit for magnetic resonance tomography installations simultaneously serves patient's support, and functions in combination with automatically controllable positioning system of medicinal instruments," Granted patent DE19905239A1 (2006-08-24)
- Oliver Wendt, Johann Oellinger, Tim Lueth (2000): Device for navigating and positioning medical instruments in magnetic resonance tomographs, Filed PCT Patent WO-0213709-A1
Tim Lueth honored with the Alfried Krupp Prize for young university professors (1999)


Tim Lueth was honored with the Alfried Krupp zu Bohlen und Halbach Prize for young university teachers in 1999. The prize is awarded annually to only one young university teacher in Germany, aged 38 or under, across all disciplines. The prize was/is endowed with 1 million DM/euros, thus freeing the winner from financial worries in their research for the next few years. Tim Lüth received the prize from Federal President Dr. Johannes Rau and Curatorium Chairman Professor Dr. h.c. mult. Berthold Beitz in November 1999 at Villa Hügel in Essen.
Startup Company JJM Intelligent Instruments (1999)




Project: Founding of JoJuMarie GmbH
Founder involved: Andreas Eckert, Tim Lüth, Jürgen Bier
Background: Since 1986, inspired by neurosurgeon Professor Alim Louis Benabid in Grenoble, a robot for stereotactic (navigated) deep brain stimulation without a stereotactic frame has been under development. This work was initially carried out at François DANEL's company AID. With the development of delta kinematics by Reymond Clavel at EPFL Lausanne, a team led by Hervé Druais in Grenoble at Integrated Surgical Systems (ISS, DeeMed) developed a navigation system and a robot for guiding a heavy surgical microscope using delta kinematics. The combination of navigation and robotics took place at DeeMed in Grenoble starting in 1991. The ceiling-mounted system was called SurgiScope. The first Surgiscope was installed in Grenoble in 1994 and at the Surgical Robotics Lab in Berlin in 1997. Tim Lüth worked in Grenoble for several months in 1997 to learn how to control and assemble the robot so that he could convert the device from a motorized microscope stand to a tactile surgical robot. Carl Zeiss developed a floor-mounted co-worker product called MKM. After the Swedish company ELEKTA (stereotactic frames) acquired DeeMed, it was sold to Medtronic in 2000, which thus became the world leader in surgical navigation ahead of the German company Brainlab. The robotics division was purchased at the end of 1999 by the start-up JoJuMarie GmbH, Berlin, from the US company Medtronic. There were 40 SurgiScope installations worldwide.
The Company: In 1999, Andreas Eckert (business), Jürgen Bier (surgeon), and Tim Lueth (engineering) founded the company Jojumarie Intelligente Instrumente GmbH with the aim of developing and producing medical robots and computer-assisted surgical technologies in Germany. However, the bursting of the dot-com bubble in 2000 made it extremely difficult to attract investors in Germany for computer-assisted medicine. This also affected Eckert & Ziegler AG, which was only able to return to its initial valuations 20 years later. Key employees were Stefan Weber and Christoph Tiede (later founders/CEOs of Cascination and LEM, Bern, Switzerland). Tim Lueth and Juergen Bier withdraw from JJM at the end of 2000.
Ceiling Mounted Delta-3 Surgical Robot "Otto von Decke" (1997-2001)




Project: An interactive hands-on robot for oral and maxillofacial surgery
Participating scientists: Andreas Hein, Jochen Albrecht, Malte Stien, Stefan Zachow, Frank Hoelzle, Martin Klein, Juergen Bier, Tim Lueth
Objective: The aim was to realize the world's first clinically applicable instrument-guiding Hands-on Robot (OTTO from ceiling) for tactile head surgery and to demonstrate an advantageous use for patients.
Results: In the period from early 1997 to late 1999, the ceiling-mounted delta kinematics of the SurgiScope were converted from a double joystick-controlled (submarine mode) microscope holder to a hands-on instrument-guiding robot. This involved the modification and extension of hardware components as well as a completely new real-time control, which included the active stereo camera (IGT Flashpoint 5000) in addition to the robot encoder. The robot was controlled by the surgeon's touch, whereby the robot receives a virtual mass and a virtual friction as well as virtual potential fields to precisely achieve an off-line programmed task (several implants) based on volumetric CT imaging and still give the physician the feeling of being able to move the robot freely. The controller was completed in 1999. The preparation of the approval documents for the TÜV in the period end of 1999 - beginning of 2000. The first clinical use took place in May 2000. The robot was operated in combination with a mobile intraoperative computer tomograph, TomoScan M from Philips, for 1 year regularly clinically. The doctors involved were Jürgen Bier, Martin Klein and Frank Hoelzle. The following projects investigated smaller robots (RoboDent), redundant robots (OTTO II, Mitsubishi PA-10) and Navigated Control® as a replacement for the large ceiling mounted robot. Malte Stien dealt with simulation and telemanipulation, Andreas Hein with real-time control of the hands-on robot and Jochen Albrecht (Queck) with intraoeprative tomographic imaging and automatic registration of CT and robot/navigation.
Other important research teams: a) Brian Davies, Imperial College London, United Kingdom, b) Russel Taylor, Johns Hopkins University, Baltimore, USA, c) Moshe Shoham, Technion, Haifa, Israel
Selection of our publications:
- Lueth, T.C.; Hein, A.; Albrecht, J.; Demirtas, M.; Zachow, S.; Heissler, E.; Klein, M.; Menneking, H.; Hommel, G.; Bier, J.; , "A surgical robot system for maxillofacial surgery," IEEE IECON 1998 Industrial Electronics Society, 1998. vol.4, no., pp.2470-2475
- Hein, A.; Lueth, T.C.; Hommel, G.; , "Contact observation of interactive surgical robotics systems," Intelligent Robots and Systems, 1999. IROS '99. Proceedings. 1999 IEEE/RSJ International Conference on , vol.2, no., pp.733-739 vol.2, 1999
- Andreas Hein and Tim C. Lueth: "Image-Based Control of Interactive Robotics Systems" MEDICAL IMAGE COMPUTING AND COMPUTER-ASSISTED INTERVENTION - MICCAI'99 Lecture Notes in Computer Science, 1999, Volume 1679/1999,
OTTO von Decke based on a SurgiScope Delta-3 kinematics with 6DoF. It was the first clinical used "hands-on" robot. The video shows the clinical case of the first patient.
Team Sport Sailing (1999)




Project: Team Sport Sailing (1999)
Participating scientists: Andreas Hein, Olaf Schermeier, Malte Stien, Stefan Weber, Ralf Tita, Chie-Hee Cho, Tim Lueth
Objective: Does competitive team sport support scientific output and the professional career of scientists?
Results: In 1999, Tim Lüth purchased the Eos, an old racing yacht from 1922, and, with the help of Andreas Hein and Olaf Schermeier, transferred it to Lake Wannsee (SV03). In 2000, the Eos was used as a team boat and also sailed in regattas. From 2001 to 2005, the Eos was restored. These sailors have all had impressive careers. Either sailing promoted their personal development, or they are scientific personalities who sail.
Simulation and Monitoring of Robot Assisted Surgery (1999)




Project: Simulation and Monitoring of Robot Assisted Surgery
Participating scientists: Malte Stien, Daniel Szymanski, Andreas Hein, Tim Lueth
Objective: If the movement of patients and instruments can be monitored by stereotactic measurement technology (IGT Flashpoint 5000) and by encoders of the movement of the robot kinematics, then it is possible to graphically calculate a scene that reflects the current operating situation in detail. During bone surgery (head surgery), even the removal of bone tissue and changes in CT image data can be recorded. The advantage of this procedure is that viewers can take any focus.
Results: We were able to show that using graphical simulation systems such as AnySYM/Robcad, it was possible to load image textures of current screen contents as well as medical image data into the graphical simulation in order to carry out a monitoring system for interventions in this way. In the period 1998-1999 the spectrum of applications was extended from MKG surgery to dentistry and prostate seed implantation (brachytherapy). Have in mind, that in 1999, the first onboard graphics cards for computers were shipped. We used at this time a silicon graphics machine for 100.000 DM for graphical visualization, that could be replaced by a Mac-Laptop with a comparable graphics power of 5% of the price of the SG machine a year later. The computer game “Far Cry” motivated us to introduce 3D surface models into surgical navigation and robotics.
Other important research teams: Gerd Hirzinger, DLR Oberpfaffenhofen, Germany, Hervé Druais, DeeMed-Elekta IGS, Grenoble, France, Stefan Linner, AnySIM, Munich, Germany
Selection of our publications:
- Stien M, Hein A, Szymanski D, Lueth T.: "A new approach for modelling kinematic dependencies for monitoring locations of objects in closed kinematic chains." Stud Health Technol Inform. 2002, Springer, Medicine Meets Virtual Reality (MMVR), Newport Beach, USA, Jan. 23 - 26, pp. 85: 504-506.
- Stien M, Hein A, Szymanski D, Lueth T.: "A system for simulation and monitoring of robot-assisted and navigation-assisted surgical interventions." Stud Health Technol Inform. 2002, Springer, Medicine Meets Virtual Reality (MMVR), Newport Beach, USA, Jan. 23 - 26, pp. 85: 501-503.
- Stien, M; Y.-W. Lin, T. Lueth, H. Druais, G. Volkwein, S. Linner, J. Bier (1999): "Simulation and Monitoring of Surgical Robotics Interventions," CARS 1999 Computer Assisted Radiology and Surgery, Elsevier Science B.V., 1999, pp. 818-822
- Stien, M., T. Lueth, A. Hein (1999): "Safety aspects of distributed information systems in a hi-tech OR" Automed'99, 2nd workshop "Automation processes for medicine", Darmstadt, February 25-26.In S. Leonhardt, et al. (Ed.), Progress Reports VDI - Series 17, No. 183, VDI Verlag GmbH.Stien, M.; A. Hein, D. Szymanski, T. Lüth: "Optimization of navigation-supported surgical procedures through graphic simulation."Automed 2001, Bochum, Germany, Sep. 17-18, 2001
Automatic Patient Registration for Surgical Navigation using a CT-scan (1998)



Automatically controlled imaging and registration with a motorized mobile CT scanner
Scientists involved: Jochen Albrecht-Queck, Cyrill v. Tiesenhausen, Oliver Schwerdner, Frank Hoelzle, Martin Klein, Norbert Hosten, Nils Haberland, Roland Felix, Juergen Bier, Tim Lueth
Objective: The aim of the work was to perform automatic registration of the patient during intraoperative imaging with a computer tomograph in order to subsequently perform surgical navigation or surgical robotics with minimal registration error.
Results: The procedure was first published by Tim Lüth in April 1998 in Humbold-Spektrum. For this purpose, a stationary tracker with several active LEDs was attached to the IGT Flashpoint 5000 stereo camera system and a tracker was attached to the operating table or directly to the patient's head. Since the tracker geometry can be recognized relative to the patient in the CT image and the position of the image relative to the CT tracker is also known, the patient can be registered automatically. A similar system was implemented in a second project by Cyrill v. Tiesenhausen for the BGU Clinic in Frankfurt.
Other important research teams at that time: Thorsten M. Buzug, Philips Research Laboratories, Hamburg
Selection of our publications:
- Tim Lueth: "Navigation and Robotics in Medicine," Humboldt-Spektrum 04/1998, issue 4/98, pp. 16-20.
- Albrecht, J.; T. Lueth, A. Hein, M. Stien, J. Bier (1999): Accuracy Analysis of CT Images With a Navigated Intraoperative CT. CARS'99, Paris, France, June. In H.U. Lemke et al. (Eds.), Computer Assisted Radiology and Surgery 1999, Elsevier Science Publishers.
- Hoelzle F, Klein M, Schwerdtner O, Lueth T, Albrecht J, Hosten N, Felix R, Bier J.: "Intraoperative computed tomography with the mobile CT Tomoscan M during surgical treatment of orbital fractures." Int J Oral Maxillofac Surg. 2001 Feb;30(1):26-31
Distributed Autonomous Robotic System Conference (1998)

For the first time, the IEEE Conference on Distributed Autonomous Robotic Systems is being held outside Japan. Although already a professor in Berlin, Tim Lueth is organizing the conference in Karlsruhe with the help of Rüdiger Dillmann, Heinz Wörn (successor to Ulrich Rembold), and Paolo Dario (Pisa).
Surgeons and Engineers: "Surgical Robotics Lab" at Charité Berlin (1997)
")
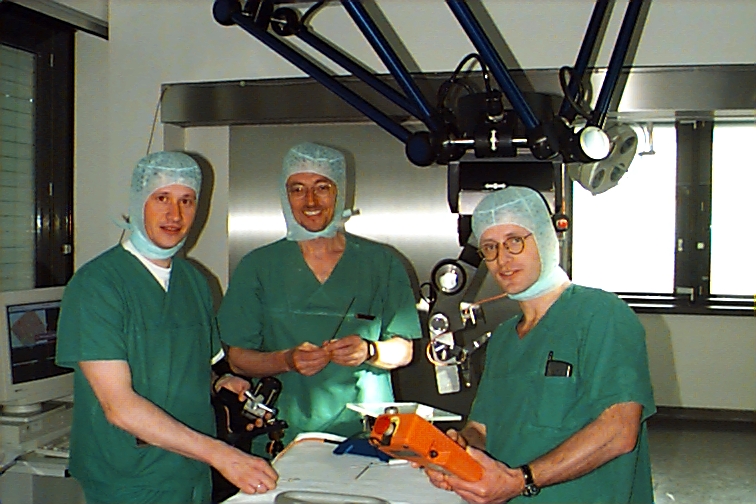


Project: The Surgical Robotics Lab Berlin
Scientists involved: Jürgen Bier, Tim Lüth, Günter Hommel, Roland Felix, Ernst Heissler, Norbert Hosten, Martin Klein, Ralf Sodian, Gero Strauß
Objective: The Surgical Robotics Lab was started by three professors, Juergen Bier (Chief Surgeon, Maxillofacial Surgery) and Tim Lueth (Engineer/Computer Scientist), with support from Guenter Hommel. Tim Lüth started in March 1997 with students Markus Pritsch and Malte Stien in Grenoble, later joined by PhD students Andreas Hein, Malte Stien, Mustafa Demirtas, Jochen Albrecht (Queck) and, shortly thereafter, Christoph Thiede. Stefan Zachow completed his diploma thesis on 3D planning at the SRL. The clinical advisor was Dr. med., Dr. med. dent. Ernst Heissler. After his departure, Prof. Dr. Dr. Martin Klein became the main clinical advisor. For cardiac surgery, it has always been Ralf Sodian from 1998 to today. In ENT surgery, it was Gero Strauß and later Heinz Stammberger. When considering computer graphics, it is important to remember that until 1999, 3D graphics were only possible on special computers costing upwards of $100,000 and were reserved for a few laboratories. This changed at the end of 1999 when the first 3D graphics cards were installed in laptops, causing the number of programmers to increase dramatically. With a year, the price dropped to $1000 or less.
Background: Juergen Bier, chief maxillofacial surgeon at the Virchow Clinic Charité, and Joachim Mühling, chief maxillofacial surgeon at Heidelberg University Hospital, were both convinced as early as the early 1990s that robots and automation would find their way into the operating room. Both drove vintage car races and had a close connection to engineering. Juergen Bier's grandfather, August Bier, had already made outstanding contributions to surgery alongside Ferdinand Sauerbruch. While Joachim Mühling worked with Ulrich Rembold (University of Karlsruhe) from 1993 onwards to prepare SFB 414 (computer-assisted surgery, the successor to SFB 314), Jürgen Bier began working with Günter Hommel (Real-Time & Robotics, TU Berlin) in Berlin. In Karlsruhe, the KFZ was also home to the Artemis telemedicine project by Voges and Kühnapfel even before the founding of Intuitive Surgical. It was Günter Hommel who approached Tim Lueth (as a postdoctoral researcher with Ulrich Rembold) in 1996 during an assessment by the DFG in Bonn, asking him if he could imagine moving to Berlin and establishing personal contact with Jürgen Bier. Starting in the fall of 1996, Tim Lüth worked with Jürgen Bier to plan the staffing and equipment setup for a surgical robotics lab, while Jürgen Bier had the SurgiScope ceiling robot (microscope holder) installed in one of his operating rooms, at that time without MPG approval. After a proper appointment procedure and completing his habilitation examination in Karlsruhe, Tim Lüth was appointed professor at the Virchow Clinic, Charité, in 1997. It was the first professorship for clinical navigation and robotics, even before Russel Taylor's professorship at JHU, Baltimore, in 1998. Brian Davies in London was working in the field already.
Text Book on Technical Multi-Agent Systems (1996)




At the end of 1996, the textbook Technical Multi-Agent Systems is submitted as a postdoctoral thesis (Habilitation) after four years at the Faculty of Information Science at the University of Karlsruhe (Karlsruhe Institute of Technology, KIT). The successful examination for the title of Dr.-Ing. habil. or Priv.-Doz. takes place in July 1997. The book is published in 1998 by Hanser-Verlag.
German Robotics Conference "Autonomous Mobile Systems" 1995

Rüdiger Dillmann, Ulrich Rembold, and Tim Lüth organize the German Conference on Autonomous Mobile Robots in Karlsruhe in December 1995.
Tim Lueth appointed FZI Head of Department "Expert Systems and Robotics"


Project: FZI Head of Department "Expert Systems and Robotics"
Results: After returning from Japan, during his time (1995-1996) as Head of Department Expert Systems and Robotics until his appointment as professor in Berlin, he completed the EU ESPRIT project MARTHA 6668, with mobile vehicles such as KAMRO and high-bay loading robots at Frankfurt Airport, was completed, and the EU ESPRIT project ART 8998 for the automation of road construction machines (asphalting) and the BMBF project KORINNA (autonomous gripping and sorting from picking boxes) were started.
Tim Lueth becomes Feodor Lynen Fellow (A.v.Humboldt-Foundation, 1994/95)




Project: Feodor Lynen Fellow (Alexander von Humboldt Foundation, 1994/95)
Involved scientists: Tsugasa Ogasawara, Hideo Tsukune, Hajime Asama, Dae-Shi Kim, Tim Lueth
Background: Tsugasa Ogasawara was a visiting researcher for one year in Ulrich Rembold’s laboratory in Karlsruhe, Germany, and worked within the KAMRO group led by Tim Lueth. After his return in 1993 to Dr. Hideo Tsukune’s laboratory in the Intelligent Machine Behaviour Department of the ETL in Tsukuba, Japan, Tim Lueth was invited to work in Tsugasa Ogasawara’s group at ETL for 12 months. With the support of reviewers Henning Tolle, Günter Schmidt, and Gerd Hirzinger, Tim Lueth became a Feodor Lynen Fellow (Alexander von Humboldt Foundation, 1994) and also an STA Fellow of the Japanese AIST, funded for 24 months to be used at any time during his lifetime. Tim Lueth stayed there for 6 month, until Ulrich Rembold asked him to return to Karslruhe.
Experience: Tim Lueth received the Feodor Lynen Fellowship as one of the first engineers ever. The ElectroTechnical Laboratory (abbreviated as Densouken in Japanese) was one of the largest and oldest research institutes in Japan. It was under both MITI and AIST, thus providing researchers with strong credentials on their meishi. Before moving to Tsukuba, it was located in Roppongi, Tokyo. In the mid-1990s, it employed about 500 people, including dozens of foreign researchers, many of whom held fellowships such as STA fellowships. At that time, it was the second-largest national research institute, working on nearly all electrotechnical topics ranging from microelectronics to hot fusion. After a reorganization on 2001-04-01, it was renamed the National Institute of Advanced Industrial Science and Technology. During his time in the Tsukune Lab in the department of Tsugasa Ogasawara, Tim Lueth shared his office with later well-known scientists such as Yunhui Liu (Hong-Kong), Alex Zelinsky (Canberra), and Ruzena Bajcsy (Berkely). Japan was at that time the nation with by far the highest number of robots worldwide. Tim Lueth spent his time working with the miniature robot Khepera and the programming language LISP.
Behaviour Based Cooperative Robot Systems "KACORS" (1994-1996)



Project: Behavior-Based Robot Control for Assembly Tasks
Participating scientists: Jochen Heinzmann, Ulrich Rembold, Thomas Längle, Ronald Grasman, Tim Lueth
Jochen Heinzmann later co-founded "Seeing Machines". Thomas Länge became later apl-Professor at KIT. Ronald Grasman went to Automotive.
Goal: Our research goal was to show that even complex tasks such as the assembly of the Cranfield Assembly Benchmark can be performed by behavior-based robots.
Results: We modified a real-time operating system (Francesco Mondada) on the Khepera robot so that it was possible to dynamically install and delete different robot behaviors as a list of multiple real-time tasks at runtime. This allowed multiple behaviors to be activated simultaneously and activated and deactivated as a process chain. We were able to show that a seemingly primitive behavior-oriented robot can nevertheless successfully remove a pen from a reservoir and insert it into a hole in this way.
Other important research teams at that time: Rodney Brooks, MIT Media Lab, Cambridge, USA, Francesco Mondada, EFPL Lausanne, Alexander Zelinsky, Canberra,
Selection of our publications:
- T. Lueth, T. Laengle, J. Heinzman, Dynamic task mapping in a real-time controller for distributed cooperating robot systems, Control Engineering Practice, Volume 4, Issue 6, June 1996, Pages 831-838
- Lueth, T.; R. Grasman, Th. Laengle, J. Wang (1996): Cooperation Among Distributed Controlled Robots by Local Interaction Protocols. Invited paper at ISRAM Int'l. Symp. on Robotics and Manufacturing, Montpellier, France, May, Robotics and Manufacturing, Vol. 6, ASME Press, 1996, pp. 405-410
Tim Lueth appointed Assistant Professor Position for Computer Science (1993)
Projekt: Tim Lueth appointed Assistant Professor Position at Karlsruhe Computer Science Faculty
After receiving PhD, starting at winter semester 1993/94, Tim Lueth was appointed as a university lecturer (C1). The faculty allows the designation "Assistant Professor" on business cards. A maximum of six years as a civil servant is available to complete the habilitation. At this time, Tim Lueth also resigns from his position as "Platoon Leader" at THW Mannheim, an alternative service to military duty in the German Armed Forces since 1983.
Autonomous Assembly Robot "KAMRO" (1993 / 1995)



KAMRO – Karlsruhe Autonomous Assembly Robot (DFG SFB 314 Artificial Intelligence)
Participating scientists: Thomas Hugel, Jan Schloen, Dietmar Kappey, Martin Damm, Uwe Nassal, Xioqing Cheng, Gerhard Werling, Andreas Hoermann, Igor Paromtschik, Thomas Längle, Satoshi Iwaki, Yunichi Takeno, Ulrich Rembold, Tim Lueth
Objective: The objective of the KAMRO project in DFG SFB 314 (Artificial Intelligence) was to develop an autonomous assembly robot that could perform an assembly task with just one command: "Assemble Cranfield Assembly Benchmark." The Cranfield Assembly Benchmark is a type of pendulum to be assembled with assembly subtasks of varying complexity, which was originally developed for comparing robot programming languages. The shorter the robot program, the more efficient the language. KAMRO was designed to work with only one assembly priority graph and find the shortest assembly option based on the actual position of the components on the table. To do this, parts must be picked up with one arm, transferred to the other arm, and then assembled. It must also be possible to interrupt the assembly and resume it later. To do this, components must be put down again so that they can be picked up later. For the first time, force-torque sensors on the grippers and hand cameras were to be used for the assembly.
Results: In the third phase of SFB 314 (Artificial Intelligence), the assembly of the Cranfield Assembly Benchmark was based on an assembly priority graph. The sequence control was provided by Andreas Hörmann and Xioqing Cheng. The image processing was provided by Dietmar Kappey. The robot control was provided by Jan Schloen and Martin Damm. The mobile manipulation was provided by Uwe Nassal, Martin Damm, and Tim Lueth. The work on central, decentralized, and distributed control was provided by Tim Lueth and Thomas Längle. In 1994, the robot was able to drive autonomously in Hartmut Weule's hall for 45 minutes via Wi-Fi, connected to AI planning with a real-time operating system on board, to assemble, interrupt the assembly, and resume it. KAMRO is now on display at the Deutsches Museum in Munich. It was previously built during the first phase of SFB 314 (Artificial Intelligence 1985-1987, 1988-90, 1991-1993, 1994-1995) at Ulrich Rembold's chair. It consists of a holonomic platform with Mecanum wheels and two PUMA 260 arms in a hanging configuration, proposed by Rüdiger Dillmann. In the second phase, the Cranfield Assembly Benchmark was assembled using teach-in programming.
Other important research teams at that time: Oussama Khatib, Stanford Robotics Lab, Rüdiger Dillmann, University of Karlsruhe, initiated the KAMRO project while he was still a research assistant at Rembold's chair. He later built the PRIAMOS robot at his own chair.
Selection of our publications:
- Lueth, T.C.; Rembold, U.; , "Extensive manipulation capabilities and reliable behavior at autonomous robot assembly," Robotics and Automation, 1994, IEEE International Conference on , pp. 3495-3500 vol.4, May 8-13, 1994, also invited for the IEEE R&A Magazine;
- Nassal, U.M.; Damm, M.; Lueth, T.C. (1994): Mobile Manipulation A Mobile Platform Supporting a Manipulator System for an Autonomous Robot. WCRR SME World Conference on Robotics Research, pp. 11-11 to 11-24. (invited for the SME Trans. MS94-218)
- Laengle, Th., T.C. Lueth, U. Rembold (1995): A Distributed Control Architecture for Autonomous Robot Systems. In H. Bunke et al. (Eds.), Modelling and Planning for Sensor Based Intelligent Robot Systems, World Scientific, pp. 384-402.
- The robot KAMRO is located today at the Deutsche Museum in Munich. Nevertheless from 1992-1996, the robot was the highlight of the SFB 314 (Artificial Intelligence and Robotics) in Karlsruhe, Kaiserslautern and Saarbrücken.
Even 30 years later, the video and the capabilities are astonishing.
Video 1994: Autonomous Assembly Robot KAMRO (5 Minutes - accelerated 5 times)
Video 1993: Autonomous Assembly Robot KAMRO (5 Minutes - accelerated 5 times)
Simulation and planning of assembly systems and autonomous robots (1992)




Project: Simulation and planning of assembly systems and autonomous robots (ESPRIT-2 CIM-PLATO | SFB314)
Participating scientists: Klaus Hoermann, Bernd Welz, Tim Lueth, Jianwei Zhang, Ulrich Rembold, Georg Näger, Ulf Osmers, Christoph Winterhalter
Objective: The aim of Tim Lueth's work was to plan the layout of a robot production cell in such a way that movement tasks could be performed without collision.
Results: Using the software library developed by Peter Adolphs (later CEO of Pepperl+Fuchs) at Professor Henning Tolle's (ISRA AG) for real-time motion planning of a KUKA robot, it was possible to transform the potential obstacles into the Cartesian configuration space (Klaus Hoermann). We were able to show that motion planning is possible under geometric constraints in Cartesian configuration space and thus without simulation.
Other important research teams at that time: Hartmut Weule and Dieter Spath, University of Karlsruhe, Peter Adolphs and Henning Tolle, Technical University of Darmstadt
Selection of our publications:
- Lueth, T.C.; , “Automated planning of robot workcell layouts,” Robotics and Automation, 1992. Proceedings., ICRA 1992 IEEE International Conference on , vol., no., pp.1103-1108 vol.2, May 12-14, 1992
- Näger, G.; Lueth, T.C. (1994): Development of an Integrated Domain Representation for Configuration, Action Planning, and Layout Planning of Assembly Systems, ISPE/IFAC Int.´l Conf. on CAD/CAM, Robotics and Factories of the Future, Ottawa, August, 21-24, 1994, pp. 87-92.
- T. Lueth, U. Osmers, D. Spath, U. Rembold: “Information Infrastructure and Information Processing in Distributed Controlled Production Cells,” FAIM'96, 6th Int'l. Conf. on Flexible Automation & Intelligent Manufacturing, Atlanta, Georgia, May 13-15, 1996
Neural Network Control of a Table Tennis Robot (1990) - TU Darmstadt

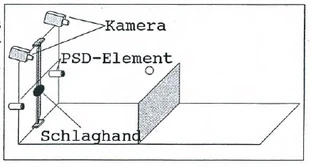
Method & System: Impact Point Calculation for the Control of a Table Tennis Game Robot with Neural Networks
Participating scientists: Kurt Siedenburg, Joachim Wietzke, Rüdiger Bien, Tim Lueth, Wolfgang Hilberg
Objective: The aim of Tim Lüth's work was to determine the point of impact of a flying table tennis ball with the help of neural networks from several position data of two PSD elements (simple 2D cameras).
Results: Based on the methods of Joachim Schürmann, the trajectory was approximated using polynomial classifiers and the quick-and-dirty rule (multi-layer perceptron) from a sequence of 2D position information of a pair of PSD element doubles and the impact point of the club (planar loudspeaker) was calculated. In the thesis, the estimated impact position was compared with the theoretically calculated impact position. The comparison with the real trajectory could not be completed.
Other important research teams at this time: Joachim Schürmann, Daimler Benz Research, Helge Ritter, Bielefeld University
Selection of our publications:
- Tim Lueth, Joachim Wietzke, Rüdiger Bien:Neural networks play table tennis [Neural-Net controlled robot plays Ping Pong] . DAGMSymposium1991: Proceeding pattern recognition 1991, 13th DAGM-Symposium, Springer-Verlag 82-87
University Research Associate with the goal of obtaining a PhD (1989)
Objective: In early 1989, Tim Lueth, holding a Dipl-Ing. degree in Electrical Engineering, begins his doctoral research—first as a scholarship holder of the State of Hesse, then as a research associate—at the chair of Wolfgang Hilberg and Robert Piloty. On December 1, 1990, he moves to the Robotics Laboratory of Ulrich Rembold and Ruediger Dillmann in Karlsruhe, as he has been fascinated by robotics and AI since his school days. During his doctorate and habilitation in Karlsruhe (1991-1996), he is not engaged in entrepreneurial activities. While he is still a Shortstop (SS) on the university baseball team in Darmstadt and an elected representative of the academic staff in the faculty council, those activities in Karlsruhe are also being reduced. Only Paragliding in Kandersteg/Switzerland, running with Bernd Welz and swimming with Jianwei Zhang remains.
Startup Company Wietzke Lueth GbR
Founder: Joachim Wietzke and Tim Lueth
Background: In 1989, Joachim Wietzke asked Tim Lueth to establish an engineering office together. Customers such as Heimann GmbH (today Smiths Detection Germany) were among the first clients. The successful collaboration ended at the end of 1990 due to Tim Lueth’s move to the laboratory of Ulrich Rembold.
Computer games on the Z80 CPU for CP/M on Nascom-C (1983)



Project: Computer games on the Z80 CPU for CP/M on Nascom-C
Participating scientists: Tim Lueth, Christian Lampson
Goal: Development of software for the Nascom C computer with the Zilog Z80 CPU
Results: In 1983 and 1984, Tim Lüth programmed the computer games “Space Invader,” “Pac-Man,” and “Reversi” (AI) in assembly language on the Nascom-C for Christian Lampson Digitaltechnik, Büttelborn (to finance his private computer). In addition, a word processing program and a Basic compiler were completed. Christian Lampson had the rights for NASCOM C Computers and CP/M disk operation system and supported Tim Lueth end of 1984 also by an MS/DOS-PC during his electrical engineering studies at TU Darmstadt (10/1984-02/89). At this time, an original IBM-PC XT (80168) with numerical processor (8087), CGA graphics board and Color monitor 5135 in the BRD was about the same price as a new VW Golf.